

人形机器人破局之路:宇树 H1/G1 的高校赋能与行业落地可行性研究

图:宇树H1、H1-2人型机器人
一、技术突破:硬件与算法的双重革新
宇树科技的 H1 与 G1 两款人形机器人,在硬件与软件层面展现出显著的技术突破。

H1 作为全球首款实现原地空翻的全尺寸电驱人形机器人,搭载 360N・m 高扭矩电机与 18 个自由度关节,配合 3D 激光雷达与深度相机,可实现 3.3 米 / 秒的移动速度与复杂地形适应能力。

图:H1后空翻
而 G1 标准版以 9.9 万元起的价格,通过自研行星减速器与力控灵巧手,实现 23-43 个关节自由度与 120N・m 扭矩,成为高校科研与工业场景的高性价比选择。
在软件层面,宇树通过开源生态与 AI 算法优化提升机器人智能化水平。G1 通过与 AI 强化学习,在工业生产线中能完成组装、搬运等任务。这些技术突破,使宇树机器人在运动控制、环境感知与任务执行能力上达到国际领先水平。
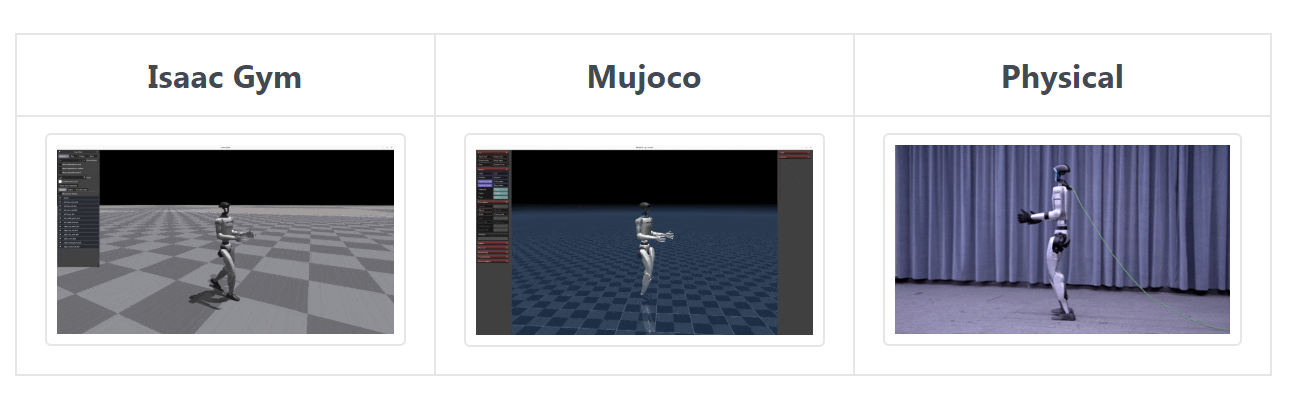
图:G1机器人强化学习
二、高校场景:从教具到科研平台的价值升维
人形机器人在高校的应用已从概念验证走向深度赋能。公开数据显示,宇树近五年中标订单中高校采购占比超 30%,2025 年同济大学以 825 万元采购 10 台 H1,创下国内高校单笔人形机器人采购纪录。这些设备正成为教学改革与科研突破的核心载体:

图:中标记录
1. 实践教学的模块化应用
G1 凭借高性价比(约为国外同类产品 1/5)与模块化设计,逐渐成为机器人工程、人工智能等专业的标配教具选择。部分高校通过 G1 开展 “人形机器人运动控制” 实验,支持学生进行步态优化、物体抓取等二次开发。

南昌理工学院人形机器人助力武功山户外探索
2. 前沿科研的场景化落地
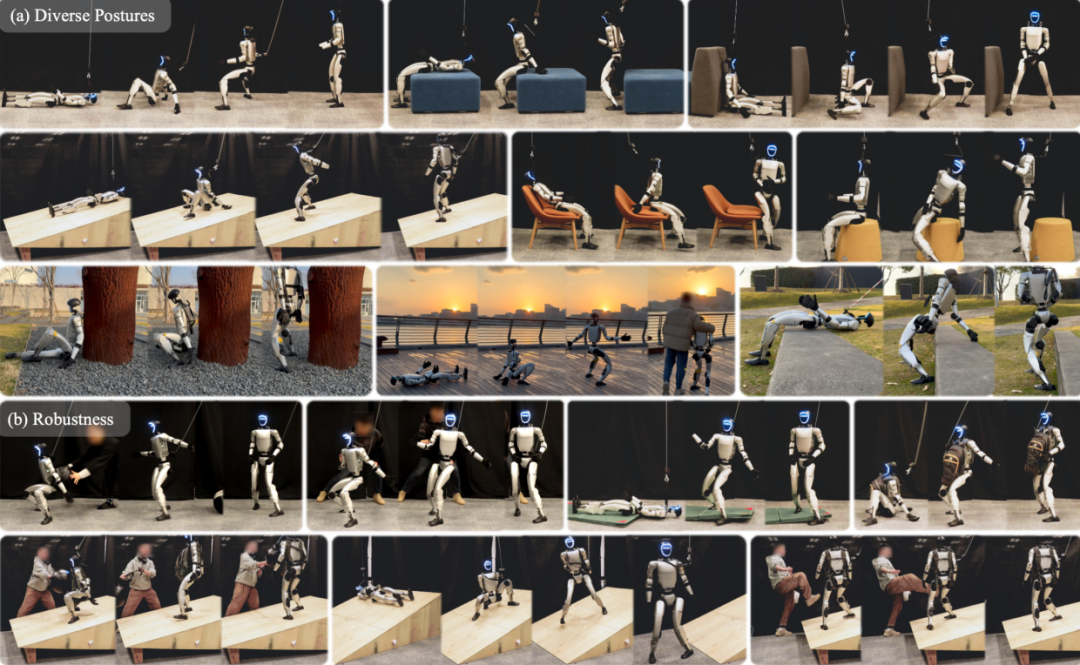
高校依托人形机器人搭建具身智能研究平台。在人形机器人研究领域,站立控制作为基础核心技术,长期面临从模拟到现实迁移难、复杂场景适应性差等挑战。上海交通大学团队近期发表的研究成果中,基于宇树科技 G1 人形机器人,提出了强化学习框架 HoST(Humanoid Standing with Terrain adaptation),成功实现了机器人在多种起始姿势和复杂地形下的稳定站立控制。本文将基于真实研究数据,解析 HoST 技术路径,并结合当前行业进展探讨人型机器人站立控制技术的发展趋势。
三、行业应用:从试点探索到价值验证的跨越
在工业与公共服务领域,宇树机器人正通过场景适配实现商业化价值验证:
1. 文化传播与公众互动的科技赋能
宇树 H1 人形机器人通过艺术化展演与场景化互动,正在重构公共服务的体验边界。其核心技术路径体现为高精度运动控制与多模态交互能力的深度融合。

在 2025 年央视春晚《秧 BOT》节目中,16 台 H1 与舞蹈演员协同完成秧歌舞表演,通过3D 激光 SLAM 定位与舞蹈节奏对齐算法,实现了毫秒级队形变换与手绢抛接的精准控制。

2. 服务行业的模式创新试探
G1 的租赁经济初现雏形。据二手平台监测,2025 年一季度 G1 租赁订单环比增长显著,日租金集中在 5000-1.5 万元,主要用于高端展会接待与企业展厅讲解


机器人租赁 | 商演 | 展示
四、冷思考:噱头与刚需的现实博弈
人形机器人的发展仍面临多重挑战:
1. 技术瓶颈
智能化是核心痛点。当前 AI 技术在多任务处理与通用性上存在不足,H1/G1 在工业场景中仍依赖预设路径,人型机器人的复杂语义理解准确率有待提升。此外,电池续航与硬件可靠性仍是制约因素。
2. 成本与规模化
宇树的成本控制策略(如自研减速器、简化设计)使其产品价格仅为国外同类产品的五分之一,但 H1等人型机器人的售价仍高于高校与中小企业预算,规模化应用不足;工业场景中,企业更倾向采购单价更低的传统 AGV、机械臂。
3. 场景适配
人形机器人的外形优势在实际应用中可能成为劣势。例如,G1 的拟人化设计在工厂中不如机械臂高效,其 3 指灵巧手无法完成精密组装;H1 的 1.8 米身高在狭窄空间作业受限。此外,用户对机器人的接受度存在差异,部分企业担忧人机协作的安全性与伦理问题。
结论:场景定义技术,价值驱动落地
宇树 H1 与 G1 的实践表明,人形机器人已从 “技术秀场” 走向 “价值赛场”。高校场景中,其作为科研载体的价值明确;行业场景中,在高危环境作业等领域展现实用潜力。然而,规模化推广仍需突破技术、成本与形态适配等瓶颈。未来,随着技术与场景的深度融合,人形机器人有望从 “实验室展品” 逐步向 “产业刚需” 蜕变。































