R1
G1
H1/H1-2
接入DeepSeek
型号:A2
D1-INFINITE
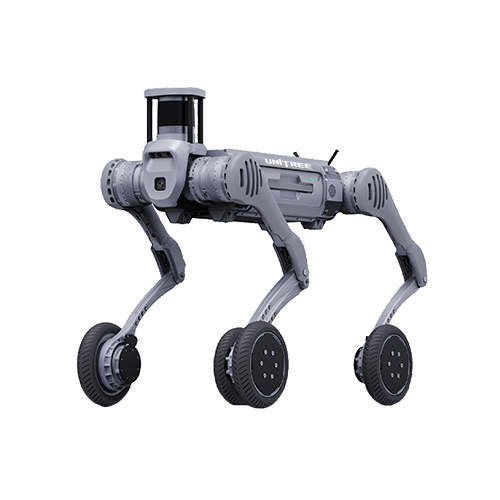
Go2
B2-W系列
灵枢
Limo系列
白名单赛事
DF-Kits
天璇系列
群控制系统
DF-AutoWare
定制化开发
Tita Plus
Cobot Magic
DF-RMC
DF-Tora
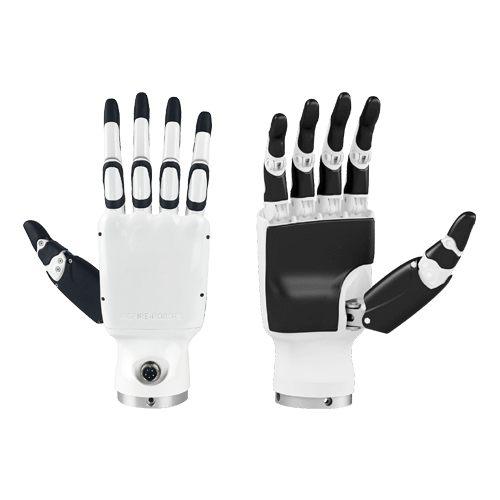
五指灵巧手
仿生手爪
软体夹爪
高仿真机械手部解决方案,以创新直线驱动技术与力位混合控制算法为核心,精准复刻人类手部运动逻辑,为机器人科研、仿生机械、人机交互等领域提供兼具灵活性与精准度的操作单元。
地址:山东省青岛市市北区黑龙江南路2号乙803户 电话: 0532-87621819
具身智能方案 人工智能+方案 移动机器人方案 机器人集成方案 单双臂协作方案 传感器配件
横向课题 成果运用 全球资源 专题会议 军工品质 大赛保姆
售后资料 视频资料 产品培训 技术博客
关于我们 加入我们 联系我们
渠道商务合作:13658663399 13687670777
售前技术咨询:16678687621
售后服务热线:0532-87621819