R1
G1
H1/H1-2
接入DeepSeek
型号:A2
D1-INFINITE
Go2
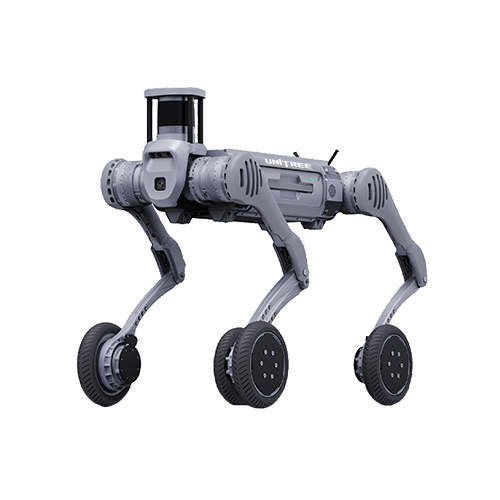
B2-W系列
灵枢
Limo系列
白名单赛事
DF-Kits
天璇系列
群控制系统
DF-AutoWare
定制化开发
Tita Plus
Cobot Magic
DF-RMC
DF-Tora
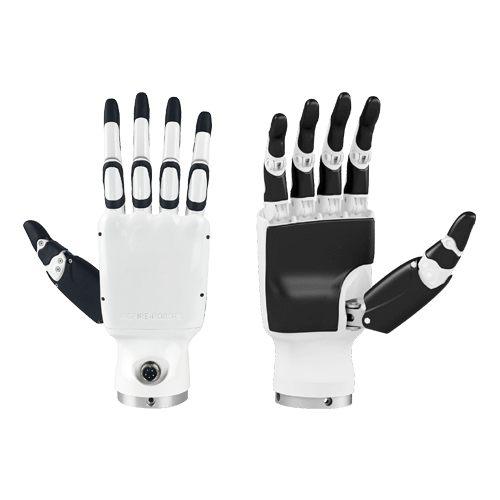
五指灵巧手
仿生手爪
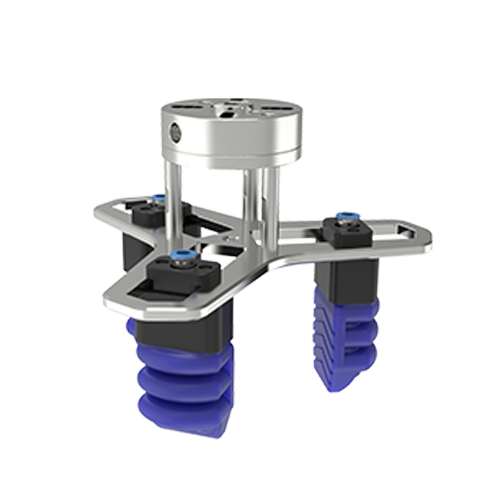
软体夹爪
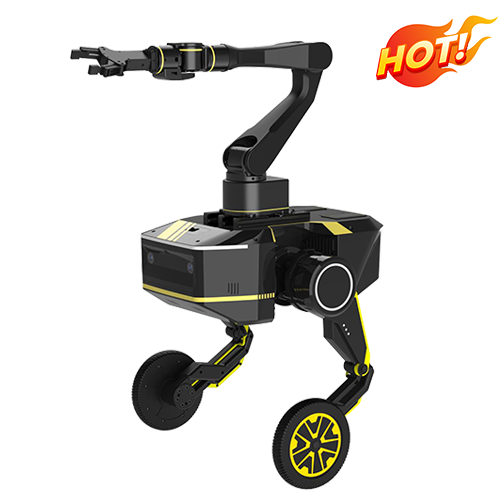
双臂复合机器人平台是基于超轻量仿人机械臂打造的智能化通用平台,专为创新教育、科研实训及服务场景设计。产品融合移动底盘、双臂协同操作、视觉感知与语音交互能力,以高集成度、强开放性及多功能特性,为用户提供从基础教学到复杂任务开发的全链条支持。提供兼具专业性与易用性的双臂机器人解决方案,推动智能机器人技术在教学与产业中的深度落地。
创新教育:高校机器人实验室、职业院校实训基地,用于机械臂控制、人工智能、机器人学等课程教学与竞赛培训;
科研开发:双臂协同算法研究、人机交互技术验证、服务机器人场景模拟(如智慧家居控制);
商业服务:科技展览、活动表演(如机器人舞蹈)、展厅导览,通过双臂动作展示与语音交互提升科技感;
生活服务:家庭辅助(如简单家务操作)、养老护理(如物品递送)等场景的原型开发与测试。
地址:山东省青岛市市北区黑龙江南路2号乙803户 电话: 0532-87621819
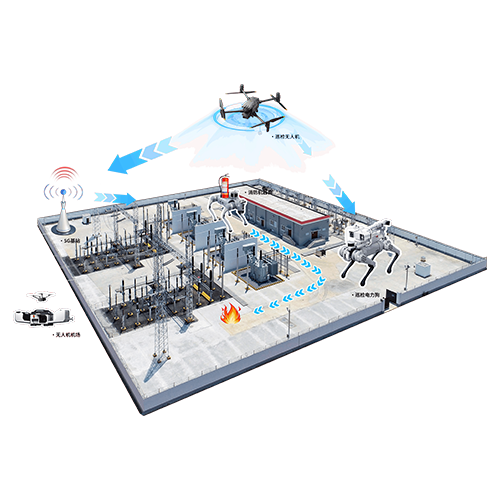
具身智能方案 人工智能+方案 移动机器人方案 机器人集成方案 单双臂协作方案 传感器配件
横向课题 成果运用 全球资源 专题会议 军工品质 大赛保姆
售后资料 视频资料 产品培训 技术博客
关于我们 加入我们 联系我们
渠道商务合作:13658663399 13687670777
售前技术咨询:16678687621
售后服务热线:0532-87621819