

点击蓝字,关注我们
近年来,人形机器人凭借其推动经济和社会发展的潜力,受到了广泛关注。浙江大学的研究团队在《A Comprehensive Review of Humanoid Robots》这篇论文中,对人形机器人的发展进行了全面梳理。下面,就让我们深入了解一下人形机器人的世界。
「READING」

人形机器人的发展历史颇为悠久。1969 年,日本早稻田大学的 Ichiro Kato 创造出第一个双足机器人,不过它仅有下半身,能实现静态行走。到 1972 年,第一个全身人形机器人问世。此后,人形机器人经历了基础理论构建、关键技术突破等阶段,如今已迈向产业化。
在国际上,本田的 ASIMO 于 1986 年开启研发之旅,2000 年正式推出,它能完成踢球、倒水等复杂任务,不过因成本高昂和扩展性受限,2018 年项目终止。波士顿动力的 Atlas 在 2013 年发布,专为灾难救援设计,经过不断改进,如今能完成跑酷等高难度动作。2022 年,特斯拉推出 Optimus,展示了其在工业和家庭场景的应用潜力。美国 Figure AI 公司的 Figure 01,在与 OpenAI 合作后,具备了更强的环境感知和对话能力。

本田 ASIMO机器人

特斯拉 Optimus机器人
国内人形机器人研究起步于 20 世纪 90 年代,众多高校和企业积极参与。北京理工大学的汇童机器人能独立行走、打太极拳;浙江大学的 “悟空” 系列表现出色,“悟空 IV” 运动能力强劲。优必选科技、宇树科技等企业也纷纷推出自家的人形机器人产品,推动着行业的发展。

宇树 G1机器人

人形机器人的头部在人机交互中扮演着重要角色,其设计主要分为非拟人化和拟人化两种。非拟人化头部又可细分为两类:
一类完全没有人类外观,常用于工业场景,主要承载传感器;
另一类含有部分人类特征,常用于接待、服务等领域,通过屏幕、投影仪或机械结构来展示表情。
拟人化头部则追求高度逼真,其发展历经三个阶段:
第一阶段注重外观,通过特殊材料和驱动方式实现逼真的面部效果;
第二阶段强调拟人化运动,包括眼神交流、唇同步等;
第三阶段聚焦拟人化心理学,借助情感模型和状态管理系统模拟人类情感反应。
人形机器人的身体组件是硬件和软件的复杂结合。硬件架构方面,机械结构模仿人类骨骼系统,自由度影响着机器人的运动能力。传感器系统包含视觉、触觉、听觉等多种传感器,为机器人感知环境提供支持。动力系统则根据不同需求,选择伺服电机、液压系统或气动系统。
软件架构主要包括操作系统和通信方案。实时操作系统和机器人操作系统(ROS)保障机器人的稳定运行,EtherCAT 协议实现了数据的快速传输。

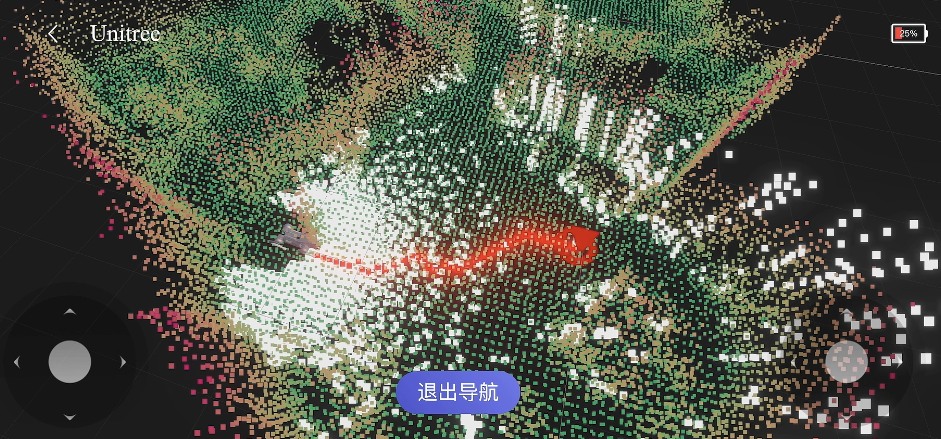
环境感知技术让机器人能够了解自身状态和周围环境,包括状态估计、鲁棒定位和三维占用预测。通过融合视觉、惯性测量单元等多种传感器的数据,机器人可以实现高精度的定位和环境建模。不过,在复杂环境中,视觉外观变化、视角改变等问题仍需解决。

自主导航框架包含全局规划、局部规划和脚步规划。全局规划借助预建地图或稀疏拓扑地图寻找可行路径;局部规划负责躲避动态障碍物;脚步规划则选择合适的落脚点。目前,多模态导航和基于学习的方法是研究热点,但仍面临诸多挑战。
运动控制是人形机器人的关键技术之一,基于模型的方法通过运动学和动力学建模来保障机器人的平衡,而基于学习的方法则利用数据驱动技术让机器人从经验中学习运动策略,以适应复杂环境。

智能操作涉及任务规划和技能学习。任务规划通过符号推理、大型语言模型等方式确定动作序列;技能学习则包括单任务、多任务和长时操作技能的学习,使机器人能够完成从简单抓取到复杂装配的各种任务。

人形机器人的应用场景十分广泛。在工业领域,它们可以承担重复性任务,缓解劳动力短缺问题;在服务行业,可担任导游、接待员等角色;在家庭中,能成为贴心助手,照顾老人和病人;在危险环境下,还能执行探险和救援任务。
当前,人形机器人发展面临诸多挑战。外观设计上,要在拟人化和简化之间找到平衡,避免 “恐怖谷” 效应;情感互动方面,需实现自然的微表情和多模态情感感知;安全与稳健性上,要防范网络攻击和适应复杂环境。
不过,未来也充满希望。成本效益的机器人平台、模块化和接口标准化将推动人形机器人的普及,具身智能的发展将使机器人具备更强的环境感知和自我学习能力。
人形机器人的发展前景十分广阔,但也需要解决一系列的挑战。相信在科研人员的努力下,人形机器人将在更多领域发挥重要作用,为人们的生活带来更多便利。
想要深入研究的小伙伴,可以戳下方论文链接:
https://onlinelibrary.wiley.com/doi/10.1002/smb2.12008
相信在不久的将来,人形机器人会更加智能、更加融入我们的生活,让我们一起拭目以待!































