

机器人遥操作技术:人类智能与机器执行的深度融合
遥 操 作
机器人遥操作是将人类操作深度融入控制闭环的智能交互技术。具体而言,操作者通过手控器、手柄等交互终端向远端机器人发送指令,并实时感知从机器人与外界环境的交互反馈,如视觉、力觉等信息,从而完成任务的人机协作模式。在此模式中,人类用户承担上层决策与认知规划,通过交互终端下达任务指令,而机器人本体则专注于底层的精准执行。

图:遥操作示例
这种主从式系统本质上是人类智能与机器执行能力的深度融合。操作者负责复杂环境下的认知决策与经验判断,弥补了机器人在自主控制、多模态传感及人工智能方面的技术瓶颈。“人类决策 - 机器执行” 的协同模式,在应对复杂环境感知、多任务协同,尤其是极端突发情况时,展现出超越单纯智能编程的独特优势:人类的柔性决策能力可快速处理非结构化数据,如模糊图像识别、突发风险评估等,而机器人的机械精度则确保了操作的稳定性与安全性,使其能够在高危或极端场景中替代人类完成作业。
遥操作的应用方向
当前,该技术已形成多领域渗透的应用格局。随着人类探索活动向深空探测、核能利用、深海开发等高危复杂领域延伸,遥操作技术的价值愈发凸显。
一方面,它避免了人类直接暴露于辐射、微重力、高压等危险环境,大幅降低了太空作业、核设施维护等任务的成本与风险,例如减少宇航员舱外活动频次;
另一方面,针对当前智能机器人受限于机构设计、控制算法和传感技术,难以在未知环境中全自主作业的现状,遥操作通过 “人类实时决策 + 机器精准执行” 的协同机制,使机器人能够高效完成空间装配、深海采样、远程制造等复杂任务。
从长远来看,这种技术范式不仅是现阶段突破机器人自主性局限的关键路径,更是未来拓展人类活动边界、增强极端环境作业能力的核心手段,推动人机协作从 “辅助工具” 升级为 “能力延伸的基础设施”。
遥操作技术的起源与发展历程
从科幻构想走向多领域赋能
一
萌芽阶段(20 世纪初至 1950 年代)
从科幻构想到核工业刚需
1. 概念起源与早期探索
科幻作品为遥操作技术提供了最初的灵感来源。1942 年,科幻作家罗伯特・海因莱因在《沃尔多》中首次提出 “通过机械手套远程操控机械臂” 的设想,将 “远程操作” 概念具象化,成为后续技术研发的重要灵感源泉。
军事与核工业的需求则推动了早期技术的实践。二战后,核技术的发展催生了远程操作的需求。1945 年,美国橡树岭国家实验室开发了首台机械连杆式遥操作器,用于处理放射性物质。该设备通过纯机械结构实现 “主从联动”,即操作员在安全区域操作主端手柄,从端机械臂同步模仿动作,标志着 “主从控制” 架构的诞生。
2. 理论奠基
1954 年,美国工程师雷蒙德・克莱恩提出 “主从机器人系统” 理论,明确了遥操作的核心框架:主端输入指令,从端执行并反馈状态,形成闭环控制,为后续技术发展奠定了理论基础。
二
技术奠基期(1960 年代至 1990 年代)
电子技术推动从机械到数字的跨越
1. 电子控制与传感器融合
20 世纪 60 年代,伺服电机和电子传感器的应用,使遥操作器从纯机械结构升级为 “电控主从系统”。1965 年,斯坦福研究所开发的遥操作臂首次集成力传感器,实现了初步的力觉反馈,如抓取物体时主端手柄震动,提升了操作的精准度和感知能力。

图:伺服电机
在太空探索领域,1983 年 NASA 的 “遥操作机器人测试床” 在航天飞机上验证了太空环境下的远程控制,为后续加拿大臂在空间站的应用奠定了基础。该系统通过数字通信解决了太空微重力环境下的精准控制问题,是遥操作技术在航天领域的重要突破。
2. 医疗与工业领域突破
1985 年,PUMA 560 机械臂完成全球首例机器人辅助神经外科手术 —— 脑部活检,尽管早期系统仅能执行单轴运动,但开创了 “医生远程操控机械臂手术” 的先河,证明了遥操作在精密医疗场景的可行性。

图:puma系列机械臂
20 世纪 90 年代,库卡、ABB 等企业推出工业遥操作机械臂,通过示教器编程,实现了汽车焊接、装配等任务的远程调试,推动了 “无人工厂” 概念的落地,提升了工业自动化水平。
三
智能化发展期(2000 年代至 2010 年代)
AI、网络与临场感技术融合
1. 通信技术突破与临场感增强
2000 年后,互联网和 4G 技术的普及,支持了跨地域控制。2005 年,日本三菱重工开发的远程建筑机器人在福岛核事故中通过 3G 网络清理放射性废墟,首次实现千米级距离操作,尽管受限于网络时延(约 500ms),需依赖操作员经验补偿延迟,但这是遥操作技术在灾害救援领域的重要尝试。

图:三菱重工远程建筑机器人
2006 年,达芬奇手术机器人引入 3D 视觉 + 力觉反馈,医生通过主端操作台能看到立体手术画面,且机械臂阻力会实时反馈到操作手柄,使缝合精度达 0.1mm,极大地推动了微创手术的普及,提升了医疗操作的精准度和安全性。

图:达芬奇手术机器人
2. 人形机器人与特种场景拓展
2007 年,丰田推出 T-HR1 人形机器人,首次实现 “人类通过外骨骼套装远程控制机器人行走”,尽管动作僵硬(步速 0.3m/s),但验证了全身关节协同控制的可能性,为人形机器人的发展奠定了基础。
2011 年福岛核事故中,美国 iRobot 的 PackBot 机器人通过遥操作进入高辐射区域,搭载摄像头和辐射传感器回传数据,成为早期灾害遥操作的典型案例,推动了应急机器人标准化研发,提升了灾害救援的效率和安全性。

图:美国 iRobot 的 PackBot 机器人
四
现代爆发期(2020 年代至今)
5G、数字孪生与具身智能驱动变革
1. 通信与算力升级催生 “实时遥操作”
2023 年,中国电信 5G 网络支持骨科机器人远程手术,实现 1000 公里距离下 0.1mm 级精度,时延控制在 30ms 以内,接近本地操作体验,打破了 “远程手术必须短距离” 的限制,展现了 5G 技术在遥操作中的强大赋能作用。
东南大学团队开发的虚拟预测环境系统,通过本地构建远端场景的数字孪生模型,提前模拟机械臂运动轨迹,即使存在 200ms 时延,仍能保证操作流畅性,已应用于核电站退役设备拆解,推动了数字孪生技术在遥操作中的实际应用。
2. 人形机器人与开源生态崛起
2023 年,国产宇树人形机器人H1、G1先后发布,支持通过 VR 手柄或手机 APP 远程控制,实现室外跑步(时速 3km/h)、单腿站立等复杂动作。其开源架构允许开发者自定义遥操作策略,如结合强化学习优化步行稳定性,促进了人形机器人技术的创新与发展。


图:宇树H1遥操作示例

图:宇树G1机器人
3. 跨学科融合与标准化
2024 年,IEEE 发布《遥操作机器人安全设计指南》,明确要求系统需具备 “紧急制动”“数据加密”“人机权限分级” 等功能,规范了医疗、工业等场景的应用安全,推动了遥操作技术的标准化发展。
据《中国数字孪生与遥操作市场报告(2025)》显示,全球遥操作相关市场规模预计 2029 年达 300 亿美元,年复合增长率 18.5%,其中医疗机器人(占比 35%)和工业物联网(占比 40%)为主要增长极,展现了遥操作技术广阔的市场前景。
五
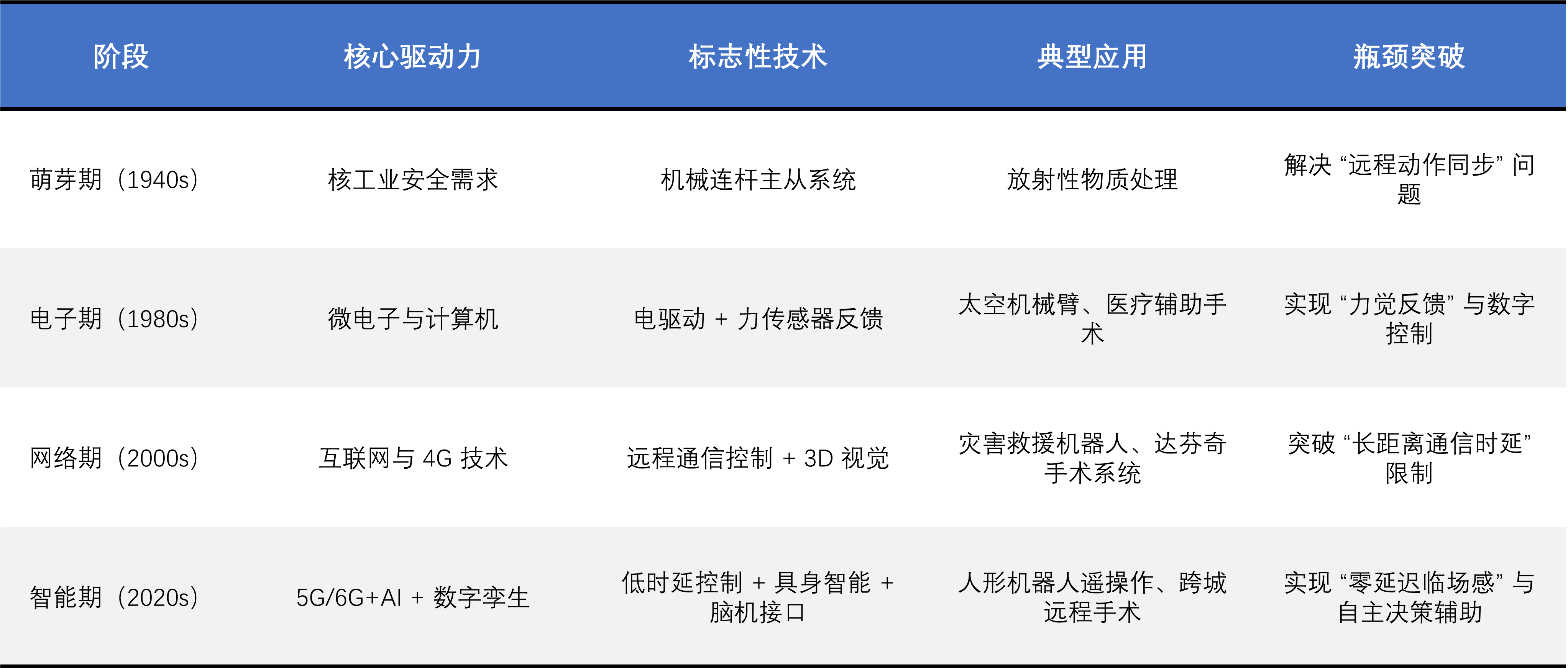
关键技术演进脉络
六
未来挑战和趋势
从 “远程控制” 到 “认知延伸”
1. 当前技术瓶颈
通信延迟:在远距离任务,如火星探测中,信号传输时延仍会影响操作实时性,制约了遥操作技术在深空等领域的进一步应用。
触觉临场感:现有力反馈设备成本高昂,且触觉智能的自主推理能力尚待突破,难以实现更精准、自然的触觉反馈。
2.前沿研究方向
具身智能融合:遥操作与大模型结合,机器人可自主处理简单任务,如避障等,人类仅需干预复杂决策,形成 “监督式遥操作”,提升人机协作效率。
6G 与空天地通信:支持卫星链路下的深空遥操作,如火星车控制等,通过星链网络将时延压缩至秒级,提升探测效率,拓展人类探索边界。
元宇宙交互:基于 VR/AR 的沉浸式操作界面普及,例如操作员通过触觉手套 “感受” 远端机器人抓取物体的质感,实现 “远程具身” 的感官体验,增强操作的真实感和沉浸感。
未来,遥操作技术将向 “具身智能” 演进,机器人不仅能执行指令,还能通过强化学习自主优化动作策略,成为人类的 “阿凡达”。随着 5G、边缘计算与 AI 技术的融合,遥操作有望在远程医疗、星际探索、智慧城市等领域实现更广泛的应用,真正实现 “运筹帷幄之间,决胜千里之外” 的愿景。































