

从陆上到水下!道非科技在 CCF YOCSEF 论坛分享具身智能 “跨域落地” 新思路
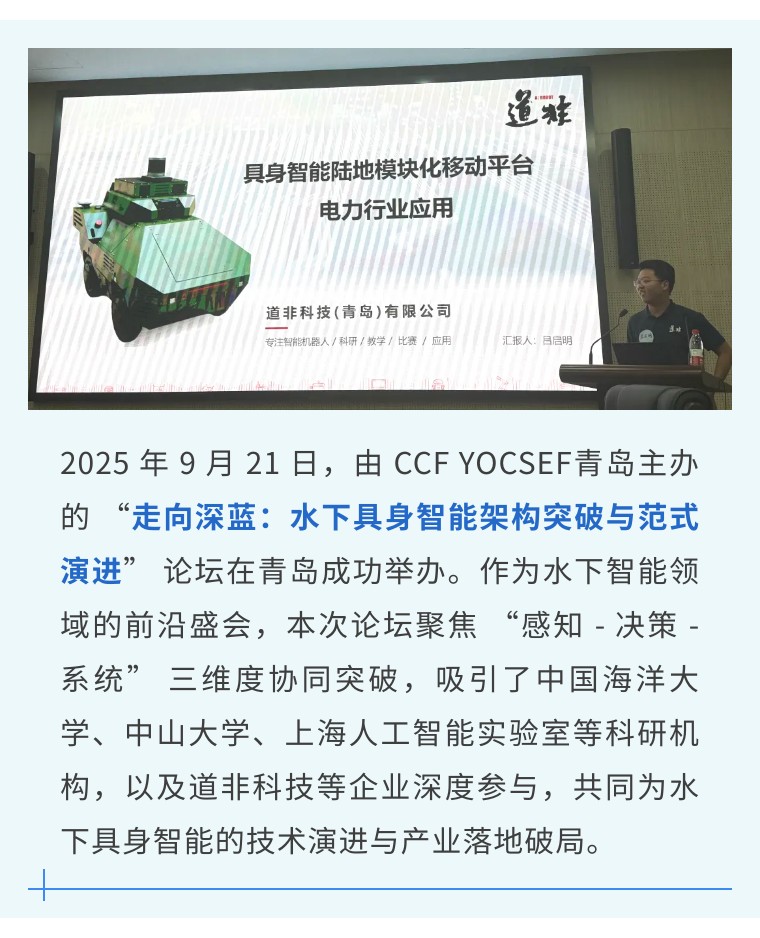

具身智能强调 “脑 - 身体 - 环境” 的动态耦合,打破传统 “离身认知” 局限,为机器人自主适应复杂环境开辟新路径。而水下作为天然 “试炼场”,高压、弱光、强扰动与通信受限等极端条件,对 “感知 - 决策 - 系统” 提出严峻挑战。本次论坛正是瞄准这一前沿方向,探索水下具身智能从技术创新到场景落地的全链路突破。



论坛日程紧凑且聚焦核心问题:从签到入场,到论坛致辞与背景介绍,再到 “水下信息智能感知与处理”“感知与记忆增强的具身视觉语言导航”“通用人形角色运动与交互控制” 等引导发言,多维度展现水下具身智能的技术前沿。
其中,思辨环节成为思想碰撞的核心,三大议题精准锚定行业痛点,现场讨论更是火花四溅:

思辨议题延伸:直击技术落地的 “真问题”
在自由讨论阶段,嘉宾们围绕 “具身智能落地难点、技术路径选择” 等话题展开深度交流:
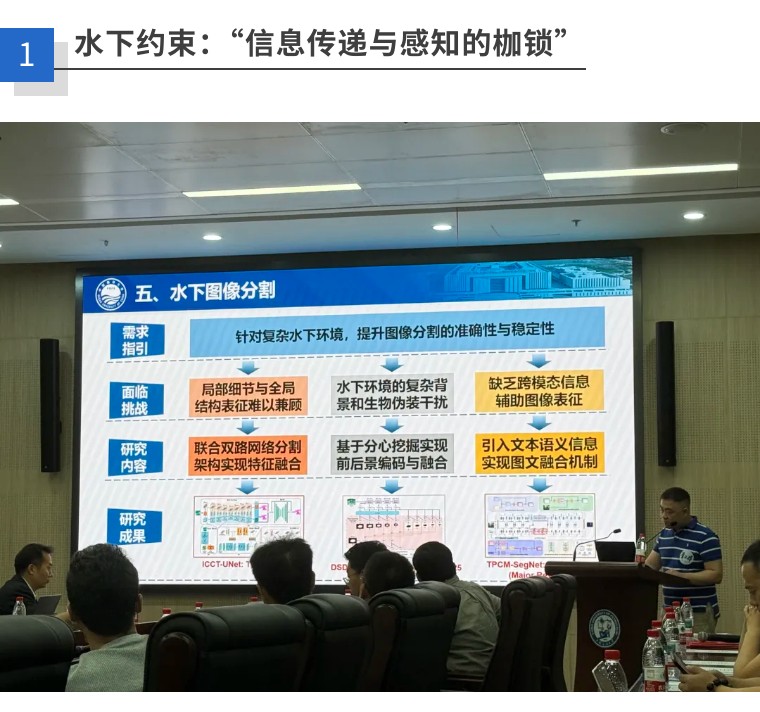
图:水下信息智能感知处理 | 中国海洋大学 董兴辉教授
水下场景的核心痛点被反复提及:声波通信带宽窄、延迟高,光学图像在浑浊水域穿透力极差,导致 “感知 - 决策” 的 “信息基础” 极度薄弱。有嘉宾感慨,相比陆上具身智能,水下在 “信息获取 - 处理 - 交互” 全链路都面临更严苛约束,“陆上是‘奔跑’,水下可能还在‘学步’”。

图:水下信息智能感知与处理 | 中山大学 李冠彬教授
有专家直言,具身智能依赖 “感知 - 行动 - 反馈” 的完整闭环,但水下环境不确定性极强(如水流突变、传感器易受浊流干扰),加之算法对复杂场景的适应性不足,导致技术从实验室到实际场景的 “最后一公里” 推进困难,“现在的技术,更像‘局部具身’,离真正的全场景自主适应还有差距”。
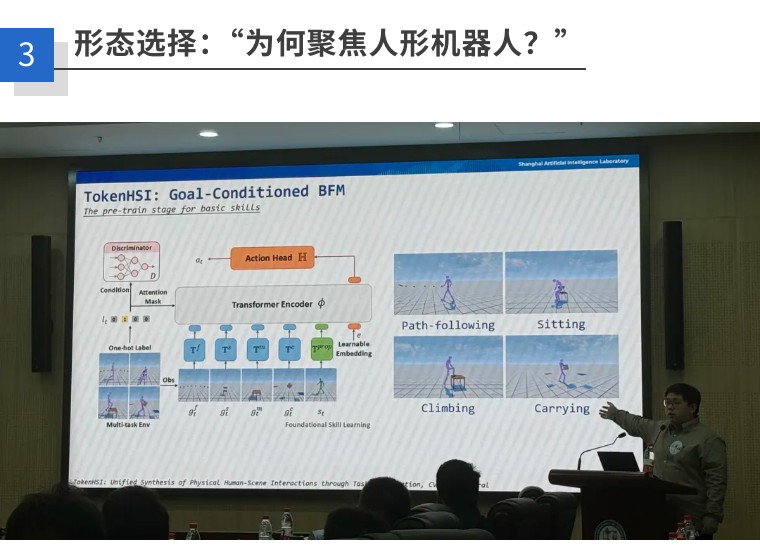
图:通用人型角色运动与交互控制 | 上海人工智能实验室 王靖博博士
针对 “通用人形角色运动与交互控制” 的引导发言,嘉宾们补充道:人形机器人的身体结构与人类高度相似,能直接复用人类在生活、工作中积累的海量环境数据(如抓取、行走的动作逻辑)与任务经验,且应用场景覆盖工业、服务等多个领域,数据获取和场景适配的 “性价比” 更高,是具身智能落地的 “优选载体”。

观点分歧引发热烈讨论:一部分专家建议 “借鉴无人机集群经验”,通过多设备协同弥补单台智能体的能力不足;另一部分专家则强调 “分步走”,提议先从湖泊等水质清澈、环境相对简单的场景入手,积累技术与数据,再逐步向海洋等复杂环境拓展 —— 毕竟水下技术成熟度远不及陆上,需降低初期落地门槛。

图:具身智能在陆地模块化应用 | 道非科技技术总监
作为特邀嘉宾,道非科技在第三思辨议题环节,以自主集成的陆上无人巡检平台为案例,阐述具身智能的落地逻辑,并为水下应用提供 “跨域参考”:

道非科技的陆上无人巡检平台,完美诠释了 “感知 - 决策 - 行动” 的具身智能闭环:
感知层:搭载视觉相机、激光雷达等多模态传感器,可精准 “感知” 国家电网变电站的设备外观、运行状态;
决策层:通过算法识别绝缘子破损、仪表数值异常等缺陷,并自主规划最优巡检路径;
行动层:借助智能移动底盘与机械臂,完成 “自主移动避障 - 精准操作检测” 的全流程无人化作业。

在变电站场景中,该平台已实现常态化无人巡检,既提升了运维效率,又降低了人工登高、带电作业的安全风险,成为陆上具身智能 “从技术到产业” 的典型样本。

图:道非科技受邀领奖

本次论坛不仅是水下具身智能领域的思想盛宴,更搭建起 “科研 - 产业” 协同的桥梁。从基础感知技术到系统级协同,从实验室仿真到真实场景落地,多方智慧的碰撞,正为水下具身智能的发展按下 “加速键”。
道非科技也将以此次论坛为契机,持续深化在水下具身智能领域的技术探索与产业合作,让陆上积累的 “智能经验” 助力 “水下智能” 真正走向深蓝、赋能行业。

【重要提示!!!】
随着微信公众号平台的更新,只有那些被标记为常读和星标的订阅号,才能确保您及时收到它们的最新推送。如果您渴望第一时间获取“道非科技”的最新资讯,只需简单两步,即可紧密跟随“道非科技”的官方微信动态:
1、设为常读:
访问“道非科技”微信公众号,多浏览、互动(如点赞、留言或转发)我们的内容,让微信了解您的偏好。
2、添加星标:
在您的微信订阅号列表中,寻找并点击“道非科技”长按其图标,直至弹出操作菜单。选择“标为星标”,这样“道非科技”将跃居列表前端,便于您快速访问。































