

宇树机器狗二次开发入门指南:
从规范到实践的清晰路径
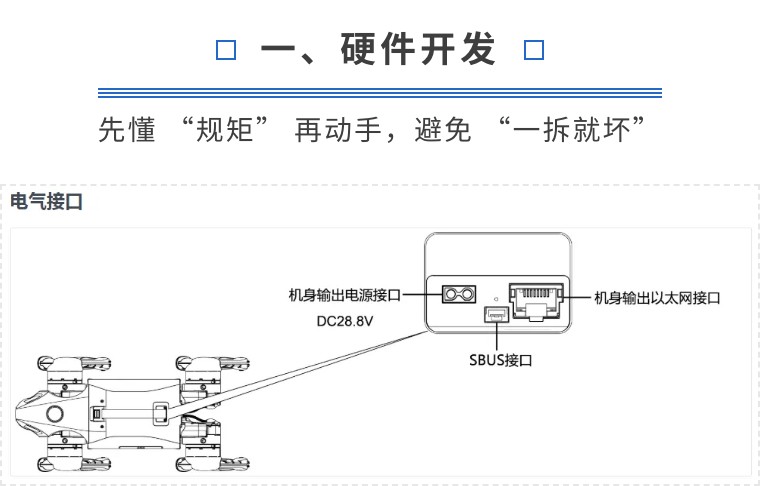
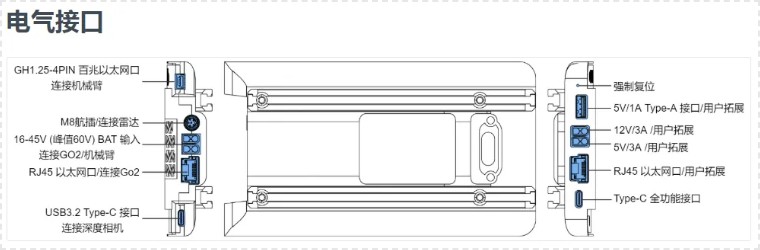
图:宇树Go2电气接口
硬件是机器人的 “身体”,改装前必须先吃透机械特性和电气标准 ——任何超出规范的操作,都可能导致主板烧毁、电机报废,甚至引发安全事故。初学者建议从 “外接简单设备” 开始,而非直接拆解核心部件。
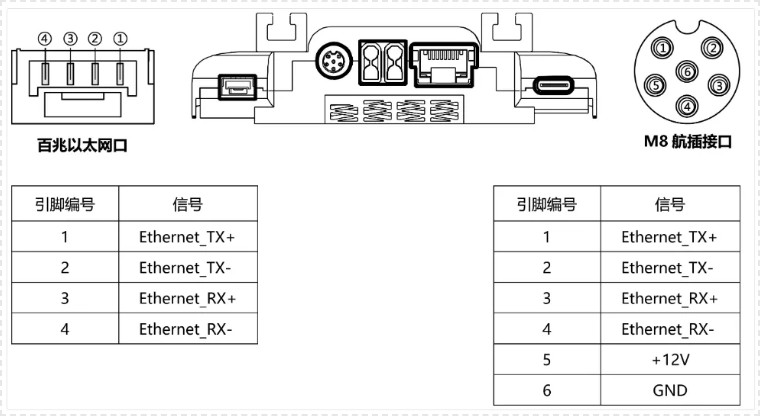
图:宇树Go2电气接口

外接传感器(如激光雷达、深度相机)或执行器(如机械爪)时,关键要解决两个问题:“接口能通” 和 “供电不烧”。
先看 “接口协议” 是否匹配:机器人主控支持的协议常见有 UART(适合短距离、低速率数据,如普通红外传感器)、I2C(适合多设备共用一根线,如温湿度传感器)、Ethernet(适合高速、远距离数据,如激光雷达)。比如你想给 Go2 装激光雷达,先查官方手册确认主控支持的协议 —— 若手册写 “支持 Ethernet 接口激光雷达”,就不能选 UART 协议的型号,否则数据传不进去。

再看 “电气参数” 是否超限:所有外接设备的电压、电流都不能超过机器人接口的额定值。最常见的 USB 接口,官方明确要求 “≤5V/2A”—— 比如你想接一个需要 12V 供电的传感器,直接插 USB 口会立刻烧毁接口;若设备电流超过 2A(比如大功率机械爪),会导致电源模块过载,机器人突然断电。
加装转接板:必须 “先仿真再接线”:如果设备接口和机器人不匹配(比如传感器是 I2C,机器人是 UART),需要加转接板。但不能直接硬接!必须用电气仿真软件验证 “信号会不会断、会不会短路”,确认没问题后再实际接线 —— 硬接短路可能瞬间烧毁主板,维修成本极高。

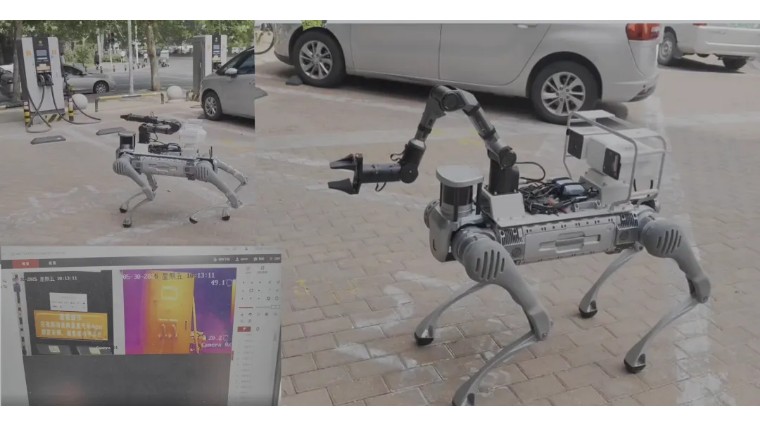
图:道非机器狗二次开发案例
给机器人加配件(如负载平台、防护壳),不是 “能装上就行”,还要考虑会不会影响运动平衡。
先查 “负载上限”:绝对不能超:官方明确 Go2系列负载 8kg—— 比如你想在 Go2背上装一个 12kg 的巡检设备,会导致电机长期过载,轻则电机发烫、寿命缩短,重则电机卡死,机器人直接摔倒。

图:道非机器狗二次开发案例
再算 “重心偏移”:不能超过 5% 机身轴距:“机身轴距” 是机器人前后轮(或前后腿)之间的距离,重心偏移量不能超过这个距离的 5%。简单说:配件要尽量装在机器人 “中间位置”,别把重的东西全挂在头部或尾部。
核心部件:绝对不能拆:关节电机、谐波减速器是机器人的 “关节”,擅自拆解会破坏精度(比如谐波减速器拆开后,齿轮间隙会变大,机器人走路会 “晃”);改装外壳时,必须保留≥90% 的原设计散热面积 —— 比如把 Go2 的腿部外壳外部加装封闭壳,电机运转产生的热量散不出去,会导致电机温度过高,自动停机保护。
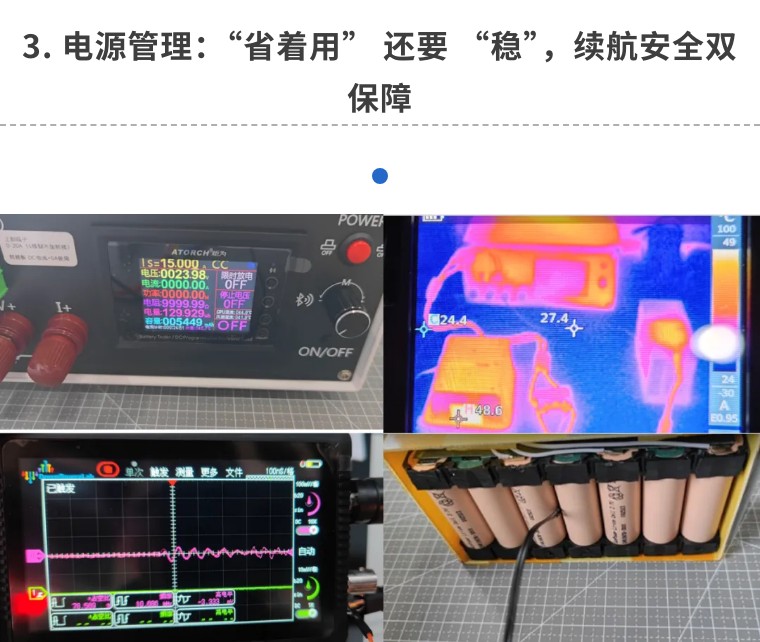
图:道非在进行二次开发时进行的电源测试

新增硬件(如边缘计算单元、高功耗传感器)会增加耗电,必须做好功耗核算和电压稳定。
先算 “功耗”:单设备峰值电流≤1A:“峰值电流” 是设备工作时的最大电流(比如边缘计算单元峰值电流 0.8A,符合要求;若选 1.5A 的,会导致电池电压波动)。初学者可以用万用表测一下设备的峰值电流,确认不超限再接入。
供电优先选 “官方扩展模块”,别直接接电池:直接从电池取电会导致电压波动(官方允许的波动范围是 ±0.3V)—— 比如电池电压是 14.8V,波动超过 15.1V 或低于 14.5V,会导致传感器数据错乱、电机控制失灵。官方扩展电源模块能稳定电压,是更安全的选择。
软件层加 “三级电量保护”:避免 “没电趴窝”:可以在代码里设置三个电量阈值:30% 时弹出 “电量预警”(提醒你准备充电)、20% 时自动 “限制功率”(比如机器人走路速度变慢,减少耗电)、10% 时强制 “自动回充”(如果有自动回充功能)或停机 —— 低电量时机器人动力不足,强行运动容易摔倒,这一步能避免安全风险。

图:宇树官方SDK开发指南
软件是机器人的 “大脑”,SDK(软件开发工具包)是连接 “大脑” 和 “身体” 的桥梁。初学者容易犯的错是 “随便改 SDK 代码”“通信频率乱设”,导致机器人响应慢、甚至失控。核心原则是:用官方 SDK、守通信规则、控资源占用。
宇树不同类型机器人的 SDK 和固件不通用,选错版本会导致 “代码写了也没用”。
第一步:确认 “SDK 版本 + 固件版本” 匹配:先查机器人机身的型号(如 Go2 Edu),再去宇树官网下载对应的最新 SDK,同时更新机器人固件到匹配版本(固件更新步骤见官方手册)。
第二步:核心代码 “不删不改”,功能封装 “标准化”:SDK 底层代码(比如运动控制算法、通信驱动)是机器人稳定运行的核心,绝对不能修改 —— 比如你觉得 “机器人走路太慢”,擅自改运动控制算法里的 “步频参数”,会导致电机动作混乱,机器人直接摔倒。正确的做法是:把电机控制、传感器读取等核心功能 “模块化封装”(比如写一个 “read_lidar ()” 函数读取激光雷达数据),并写清楚接口文档 —— 比如函数需要什么参数(如 “雷达 IP 地址”)、返回什么数据(如 “障碍物距离”)、错误码是什么(如 “-1 表示雷达未连接”),这样团队协作时别人能直接用,不用重复写代码。


图:宇树Go2通信架构
机器人和上位机(比如你的电脑)之间的通信,要解决 “数据不丢、指令不错、延迟不高” 的问题 —— 尤其是运动控制,延迟太高会导致 “你让它左转,它过 1 秒才动”,容易撞墙。
选对协议:高频数据用 UDP,关键指令用 TCP:
UDP:适合传 “高频、允许少量丢包” 的数据,比如 IMU(惯性测量单元,测机器人姿态)、关节编码器(测电机角度)的数据,通信频率控制在 50-100Hz(即每秒传 50-100 次),并采用 “增量传输”—— 比如只传和上一次相比变化的数据,而不是每次都传完整数据,这样能减少带宽占用。
TCP:适合传 “关键、不能丢” 的指令,比如急停、模式切换(从 “走路” 切到 “站立”),必须加 CRC 校验(相当于给数据 “盖章”,确认没被篡改)和超时重传(如果指令没收到,自动再发一次),防止网络丢包导致机器人 “没收到急停指令,继续动”。
延迟必须≤50ms:比 “眨一下眼” 还快:正常人眨一次眼约 200ms,50ms 是眨眼睛时间的 1/4—— 这样的延迟能保证 “你发指令,机器人立刻响应”。初学者可以用调试工具测通信延迟,若超过 50ms,检查网络是否卡顿(比如 Wi-Fi 信号差)、数据量是否太大(比如一次传太多图片)。
安全是开发的 “底线”—— 无论是机器人本身的安全(不损坏),还是开发者的安全(不被撞),都要建立 “全链路风险管控” 机制。初学者最容易忽视的是 “测试环境” 和 “急停准备”,必须重点关注。

急停是 “最后一道安全防线”,必须保证 “随时能停、立刻能停”。初学者要确保急停能正常工作:
手动急停:硬件 + 软件双保险:
硬件急停:机器人遥控器物理按钮,按下后立刻断电停机 —— 测试前先按一下,确认能停。
软件急停:上位机(如你的电脑、APP),万一机器人离你远,按快捷键就能停。
自动急停:“危险来了自己停”:代码里要加两个触发条件:
障碍物距离<0.5 米:比如机器人前面有障碍物(高度大于10cm),机器人避障程序会判定为障碍物,从而触发避障功能 避免撞上去。
电池电压过低:电池快没电时,电压会下降,过低时自动停机 —— 防止低电量导致电机失控。
机器人测试绝对不能在 “随便找块空地” 就开始 —— 地面不平、有障碍物、坡度太大,都可能导致机器人摔倒。
测试场地要求:封闭、平整、无干扰
封闭:最好在实验室或专用测试间,避免外人闯入;
平整:地面平整度误差≤3mm(大概相当于 4 张信用卡叠起来的厚度),如果地面有坑洼,机器人走路会 “崴脚”;
安全距离:测试者和机器人之间至少留 3 米距离,万一机器人失控,有足够时间反应;
无干扰:移除场地里的线缆、金属架 —— 机器人可能会被线缆绊倒,金属架会干扰传感器信号。
绝对不能去的 “危险环境”
坡度>15°:大概相当于楼梯台阶的倾斜度,机器人爬坡时容易 “后翻”;
湿滑地面:摩擦系数<0.6(比如下雨天的瓷砖地、刚拖过的地板),机器人脚会打滑,直接摔倒;
高低差>10cm:比如地面有 15cm 高的台阶,未验证的步态(比如你自己写的 “跳台阶” 程序)无法应对,会卡住或摔倒。
功能开发是二次开发的核心目标(比如开发巡检、消防场景的自定义功能),但初学者容易 “跳过仿真直接实物测试”,导致功能不稳定。正确的思路是:先仿真验证、再低速测试、最后复杂场景适配。
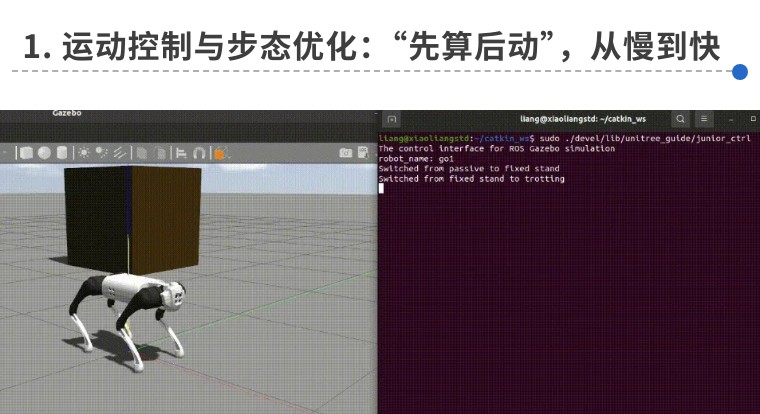
图:宇树机器狗仿真
自定义步态(比如让 Go2走 “螃蟹步”、“跳跃步”)是常见需求,但必须基于官方运动库)开发,不能 “凭空写代码”。
第一步:仿真初始化,先在电脑上 “跑通”:用动力学仿真软件(如 MATLAB/Simulink、宇树官方仿真工具)设置步态参数 —— 比如步长(每一步迈多远,建议从 0.1 米开始)、步频(每秒迈几步,建议从 1 步 / 秒开始)、关节角度范围(比如膝盖弯曲角度不超过 90°),先在仿真里看机器人走得稳不稳 —— 如果仿真里都经常摔倒,实物测试肯定出问题。
第二步:实物测试,从 “低速小范围” 开始:仿真没问题后,再在实物上测试。初始速度≤0.5m/s(比正常人走路速度慢一半),运动范围控制在 2 米× 2 米的小区域 —— 比如让机器人在测试场地里走直线,确认步态稳定(不会晃、不会崴脚),再慢慢提高速度、扩大范围。
复杂地形适配:“数据融合” 是关键:如果要让机器人走台阶、草地,不能只靠 “硬编码动作”(比如固定 “抬多少高度、迈多少步”),必须融合 IMU(测姿态)和视觉里程计(测位置)的数据 —— 比如 IMU 发现机器人前倾,视觉里程计发现前面有台阶,就自动调整步高,避免卡台阶。

多传感器协同(比如激光雷达 + 深度相机一起用)能提升感知精度,但必须先解决 “时间同步” 和 “空间标定” 问题 —— 否则数据 “不同步、不对齐”,反而影响功能。
时间同步:误差≤1ms:不同传感器的采样时间要对齐 —— 比如激光雷达在 10:00:00.000 采样,深度相机也要在 10:00:00.000 左右采样,误差不能超过 1ms(1 秒的千分之一)。可以用同步工具实现同步,否则会出现 “激光雷达看到障碍物,深度相机没看到” 的矛盾数据。
空间标定:定位误差≤1cm:要确定不同传感器在机器人坐标系中的位置 —— 比如激光雷达装在机器人头部,深度相机装在胸部,需要校准 “激光雷达看到的‘1 米处障碍物’,在深度相机里的位置是多少”,确保两者数据 “对齐”。定位误差≤1cm(大概指甲盖宽度),才能保证感知精度。

图:宇树Go2IMU校准
定期校准:周期≤30 天:传感器用久了会有误差(比如 IMU 会 “漂移”,测姿态不准;关节编码器会 “失准”,测电机角度有偏差)。可以用官方校准教程定期校准 —— 比如校准 IMU 时,把机器人放在水平台上,让工具自动修正漂移误差,确保数据准确。
功能不仅要在 “理想环境” 下能用,还要在 “极端情况” 下不崩溃 —— 比如网络断了、传感器被干扰、长时间满负载运行。
网络中断:本地模式要 “立刻切”:测试时故意断开机器人和上位机的网络(比如关掉 Wi-Fi),看机器人是否能自动切换到 “本地模式”(用自身传感器自主运动),而不是 “僵住不动” 或 “乱走”。
传感器干扰:功能要 “能降级”:比如用强光照射深度相机(模拟太阳直射)、用粉尘吹激光雷达(模拟工厂环境),看机器人是否能 “识别干扰”—— 比如相机看不清就多依赖激光雷达,激光雷达被挡就减慢速度,而不是直接失控。
满负载运行:性能不能 “掉太多”:让机器人满负载连续运行 2 小时,检查关键指标;
电机温度≤60℃:用红外测温仪测电机表面温度,60℃大概比夏天室温(30℃)高一些,不会烫伤,也不会影响电机寿命;

开发前:先通读官方手册,再找 “最小 demo” 练手
不要一上来就想 “开发复杂功能”!先到宇树官网阅读《Go2 SDK 开发指南》,搞懂接口、协议、参数;
再找官方提供的 “最小 demo”(比如 “控制机器人走直线”“读取激光雷达数据”),跑通 demo 后再修改、扩展 —— 比如把 “走直线” 改成 “走正方形”,逐步积累经验。
测试时:“一人操作,一人盯急停”,永远留 “退路”
实物测试时至少两个人在场:一个人操作电脑发指令,另一个人站在急停按钮旁,眼睛盯着机器人 —— 一旦发现异常(比如机器人要撞墙、电机异响),立刻按急停。绝对不要 “一个人测试”,万一出问题没人帮忙,风险太高。
遇到问题:先查日志,再问官方社区
开发中遇到报错(比如 “电机不响应”“数据传不过来”),先看操作日志(前面说的 “留存 72 小时的日志”),定位 “哪个步骤出了问题”;如果日志看不懂,去宇树开发者社区(官网有入口)提问 —— 描述问题时要带 “型号(如 Go2 Edu)、运控版本、报错截图、操作步骤”,官方工程师和其他开发者会更易帮你解决。

机器人二次开发是 “严谨的工程实践”,而非 “自由的创意尝试”。对初学者而言,“遵守规范” 是最快的入门路径 —— 先把 “基础规矩” 吃透,再逐步探索功能创新,才能既保证设备安全、开发效率,又能做出稳定可靠的项目。在此过程中,道非科技作为宇树机器人山东省代理商,不仅可提供合规的宇树机器人设备支持,还具备专业技术开发能力,能为初学者及行业用户解答使用过程中涉及的硬件适配、软件调试、功能开发等各类问题,为二次开发工作提供切实助力。


道非定制案例:小型四足机器人+协作臂落地应用
道非定制案例:大型四足机器人园区巡检落地应用

道非定制案例:多用途移动机器人编队
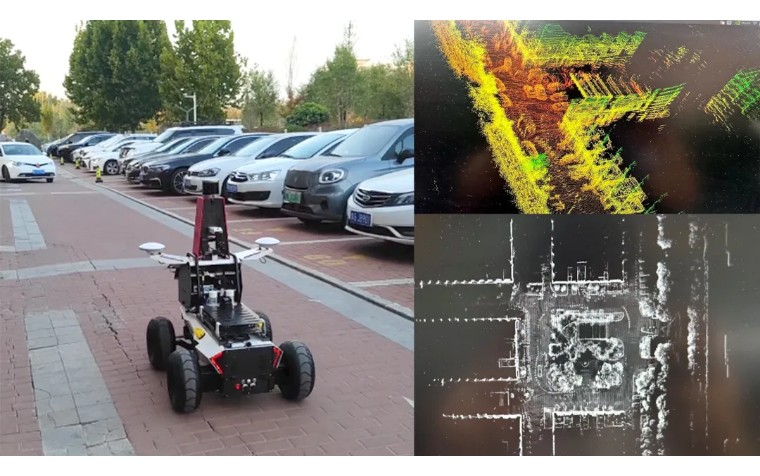
道非定制案例:园区自动驾驶
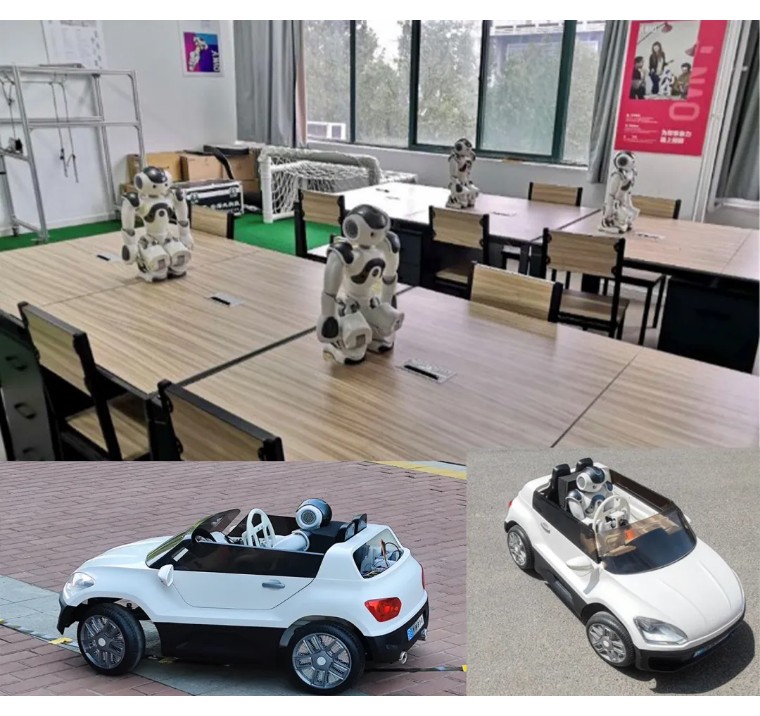
道非定制案例:NAO机器人自主驾驶

道非定制案例:实验室规划建设

道非定制案例:产品交付系列培训
「更多细分领域成功案例待您解锁,欢迎随时咨询,我们将为您呈现针对性的实践参考与方案思路。」
道非诚邀各行业伙伴携手探索智能机器人的应用边界,共筑科技赋能产业的创新蓝图。如需技术合作或方案咨询,欢迎联系道非科技,让智能装备为产业升级保驾护航!































