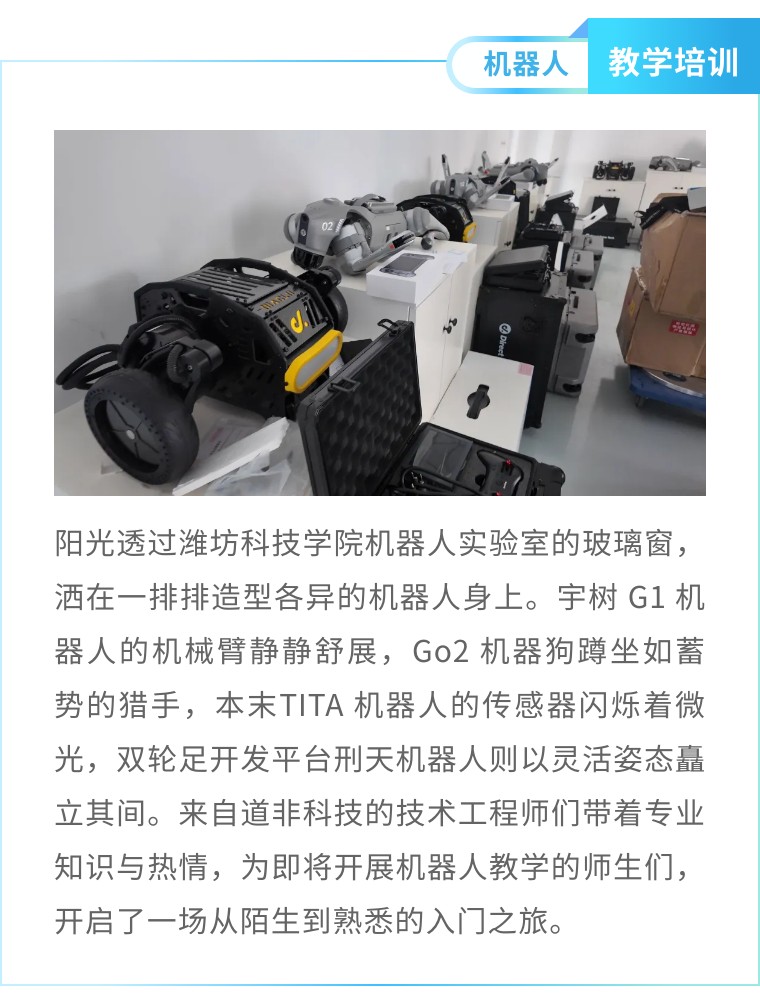
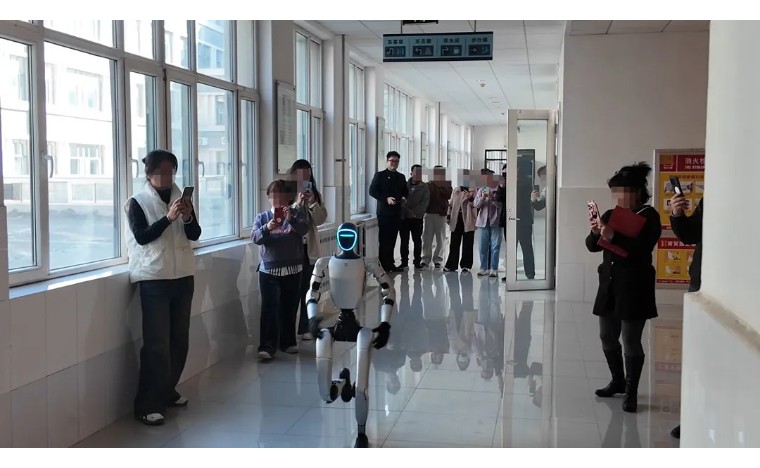
【机器人培训】 道非科技潍坊科技学院培训纪实

“大家先观察宇树 G1 机器人的关节结构,它的每一个转动轴都对应着独立的控制参数。” 工程师一边演示一边讲解,手把手教师生进行开机校准和基础动作操控。从简单的操控,到大幅度动作的操作,师生们在反复练习中掌握操作要领。针对二次开发,工程师依据厂商官网 SDK 文档,详解官方 SDK 的安装配置流程,指导大家对照文档中的代码示例,通过修改参数实现机械臂运动轨迹的自定义。“避免关节过度弯曲导致电机过载,每次使用后要清理与归位机器人。” 道非工程师同步强调保养细节。

Go2 机器狗的演示中,工程师操控它完成行走、奔跑、跳跃等动作,灵活姿态引发赞叹。“核心在于步态算法,基础使用要先熟悉遥控器逻辑,需在平坦地面开机。” 二次开发环节,工程师依据厂商官网 SDK 文档,展示基于 SDK 编程实现腿部电机控制的具体方法:“大家可对照文档中的步态参数模块,修改参数后测试效果,逐步尝试复杂功能。”

TITA 作为高动态双轮足机器人,以 8 个准直驱关节实现 3-5m/s 的移动速度与 20cm 起跳高度。“基础使用需先完成双轮平衡校准,通过手柄 / 手机 APP 实现前进、转向操控。” 工程师在讲解开发环境搭建时特别说明:“SDK 文档文档中详细标注了双轮足运动控制的接口协议,借助文档中的开源代码示例,可快速实现自定义的功能

刑天机器人作为双轮足开发平台,由 6 个直驱关节驱动,能实现站立、跳跃与地形适应。“它是二次开发的理想载体,厂商官网 SDK 文档提供了丰富的控制接口说明。” 工程师演示轮足切换功能时补充:“大家后续开发可参考文档中的接口调用示例,维护上只需每月校准平衡系统,定期检查直驱电机温度即可。”

考虑到师生课后复习需求,道非科技在培训前特意拍摄了系列入门视频。“视频涵盖机器人的开机校准、基础操控、常见故障排查等内容,还同步标注了各机器人厂商官网 SDK 文档的查询路径” 。工程师现场展示视频界面,画面中清晰呈现双轮足使用方法及注意事项,以及对照 SDK 文档修改代码的实操演示,解决了 “培训时记不全、课后忘步骤、查文档找不到重点” 的痛点。

工程师建议从多维度构建机器人二次开发学习体系:

基础学科筑基:扎实掌握高等数学(微积分、线性代数)、物理学(力学、运动学)等基础学科知识,理解机器人运动的底层原理
机器人学核心:系统学习机器人学基础理论,重点掌握运动学建模、动力学分析、传感器融合等核心知识,深入理解双轮足平衡校准等关键技术
编程语言学习:熟练掌握 Python、C/C++ 等机器人开发常用编程语言,具备基础编程能力
SDK 实践进阶:结合厂商官网 SDK 文档,系统学习 SDK 使用方法,针对轮足机器人特性修改运动参数,实现基础功能开发
场景应用提升:参考官方文档中的高级功能模块,结合巡检、配送等实际应用场景,进行完整功能开发与项目实践



此次道非科技走进潍坊科技学院的机器人培训,以 “实操讲解 + 资源支撑” 为核心,实现了从 “知识传递” 到 “能力落地” 的闭环。在机器人讲解层面,工程师针对宇树 G1、Go2 机器狗、TITA 与刑天双轮足机器人,既覆盖了基础操控、保养维护的实用技巧,又锚定二次开发痛点,以厂商官网 SDK 文档为核心指引,让技术学习有章可循;在配套支持层面,定制化入门视频的补充,解决了师生 “课后复习无依据” 的难题,进一步降低了学习门槛。
整场培训不仅打破了师生对 “机器人技术高深难学” 的固有认知,更通过清晰的五阶段学习路线,为后续机器人教学与开发搭建了清晰框架。从 “不敢碰” 到 “主动试”,从 “看不懂” 到 “能修改”,道非科技用专业与耐心,让机器人从实验室里的 “冰冷设备”,真正转变为师生手中可探索、可实践的 “教学伙伴”,为潍坊科技学院机器人教学的开展注入了扎实动力,也为更多师生迈入机器人领域打开了便捷之门。

道非科技作为宇树官方认证代理商,可提供从设备选型、课程设计到技术落地的一站式服务,助力高校构建机器人教学体系,培养面向未来的智能硬件开发人才。

道非机器狗开发集成案例:机器狗农业巡检
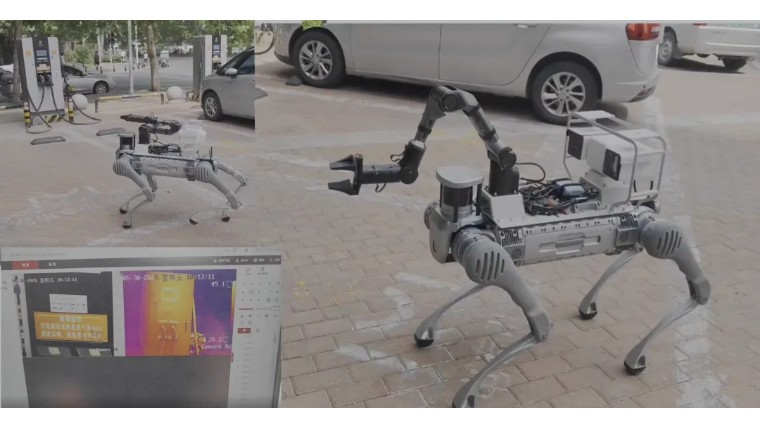
道非机器狗开发集成案例:机器狗园区巡检+视觉检测

道非机器狗开发集成案例:机器狗按需定制集成