高校实验室宇树 G1 机器人零基础入门实践指南

你们是不是会有这样的经历:
● 刚进实验室就看到「会劈叉的 G1 机器人」在角落吃灰?
● 想上手却担心「零基础学不会」「弄坏硬件赔不起」?
对于高校师生而言,人形机器人开发是融合机械设计、人工智能、控制算法的跨学科实践领域。本文以宇树科技 G1 人形机器人为载体,系统梳理从基础认知到项目开发的完整学习路线,帮助零基础学习者建立知识体系,掌握从仿真到实际部署的核心技能。

★
开启 G1 开发的基础能力构建
● Python 编程核心:掌握 NumPy 矩阵运算、OpenCV 图像处理、ROS系统通信机制,建议通过《ROS 机器人开发实践》等教材系统学习;
● C++ 基础:理解 G1 底层驱动的 C++ 实现逻辑,重点掌握类与对象、模板编程等面向对象特性

● 开发环境配置:
Ubuntu 系统(推荐 20.04 版本)安装与优化
ROS 2 开发环境搭建
Git 版本控制工具使用(推荐通过 GitHub 管理项目代码)
● 运动学与动力学:
理解 Denavit-Hartenberg(DH)参数法描述 G1 的 12 个关节运动学模型
掌握拉格朗日动力学方程在双足行走中的应用
● 传感器原理:
激光雷达(Lidar)的点云数据采集与处理
RealSense 深度相机的 RGB-D 数据获取机制
● 控制理论基础:
PID 控制算法在关节角度控制中的应用
模型预测控制(MPC)的基本原理
★
从硬件到软件的系统了解
机械本体结构:
23~43 自由度全驱动设计(G1 整机分为上半身和下半身,具备多个自由度)
轻量化铝合金框架与高扭矩伺服电机配置
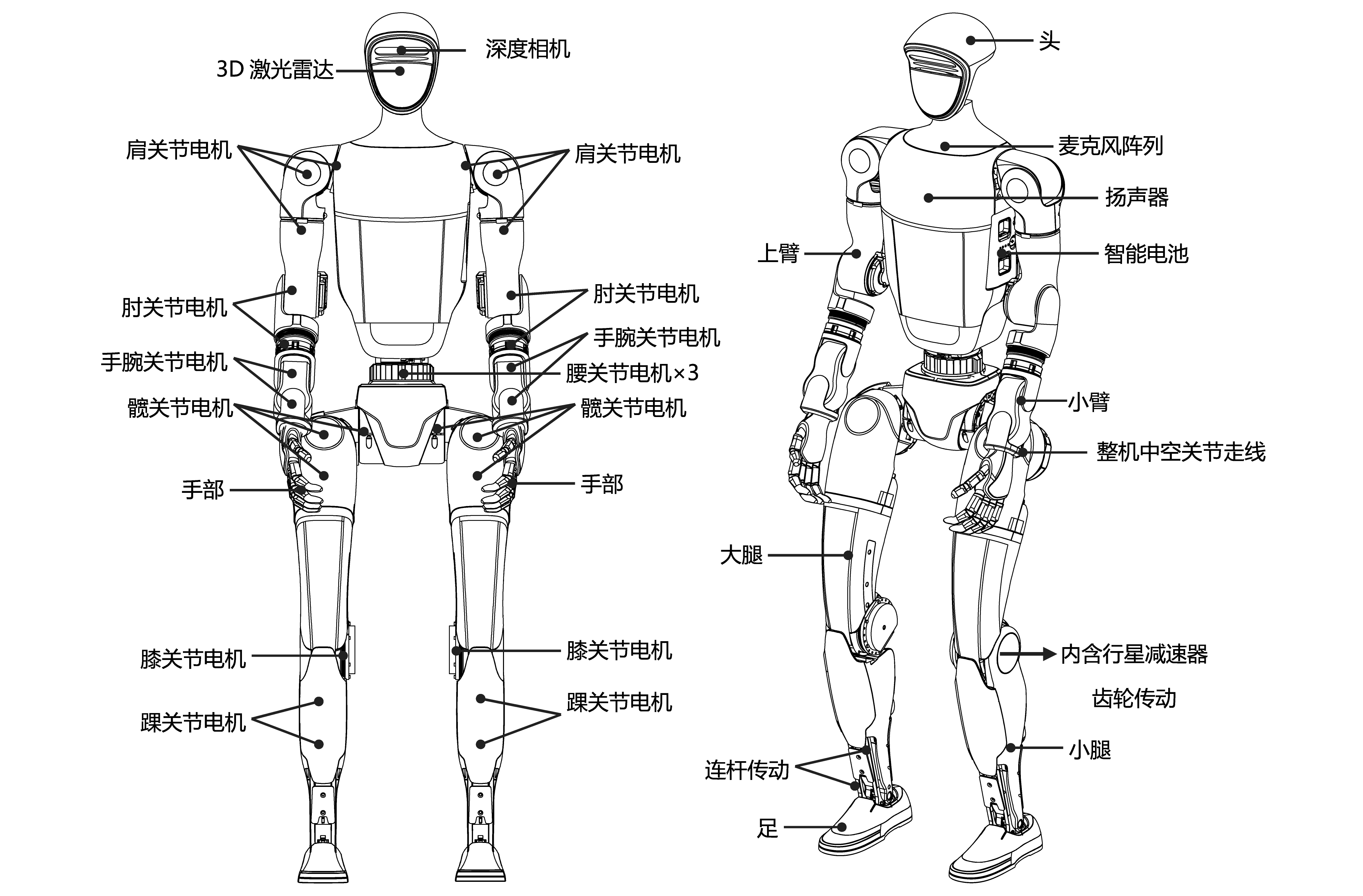
传感器套件:
3D 线激光雷达(环境感知)
RealSense D435 i深度相机(视觉识别)

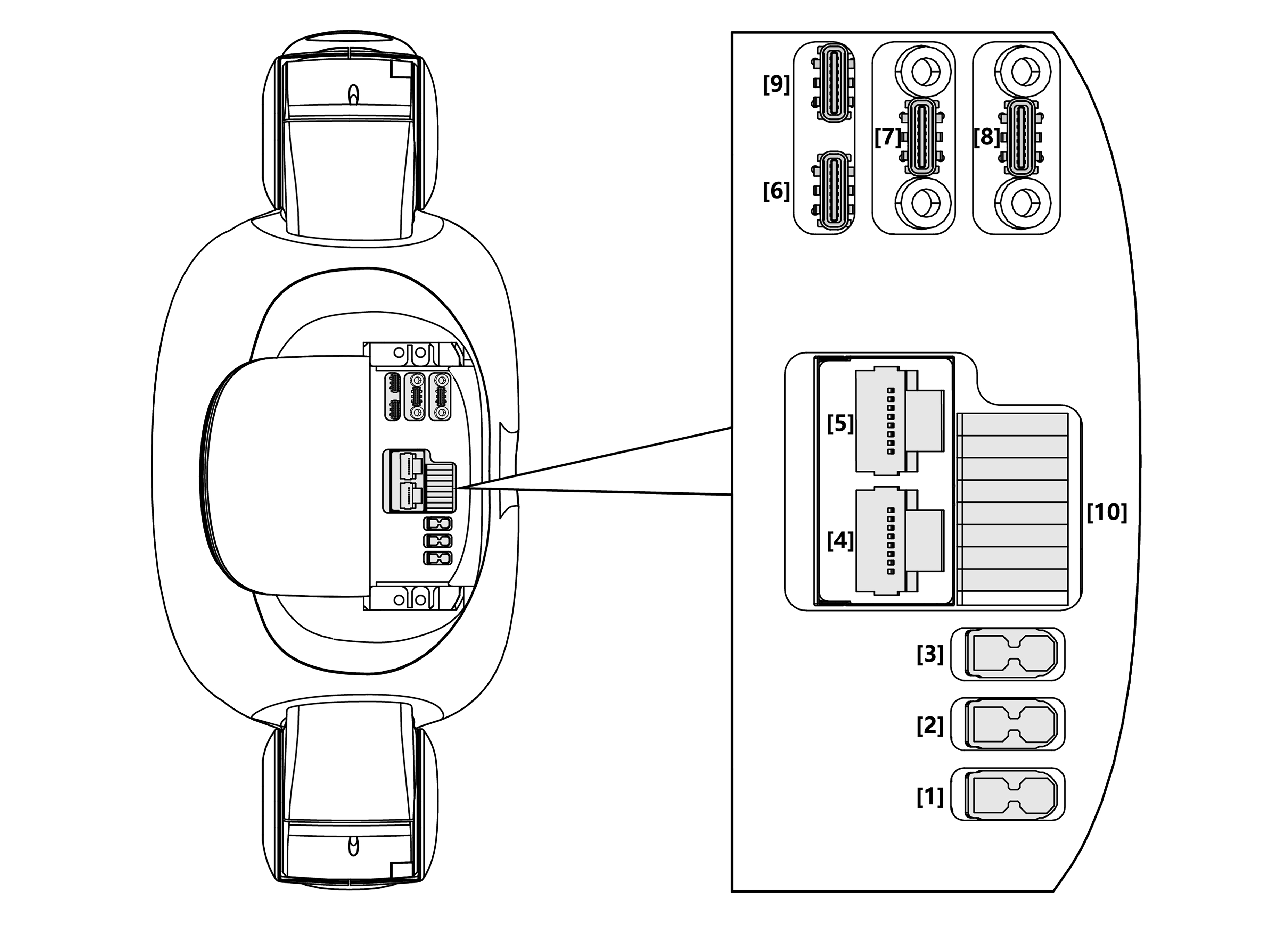
电气系统
用于连接各个机身关节电机、传感器外设、网口等

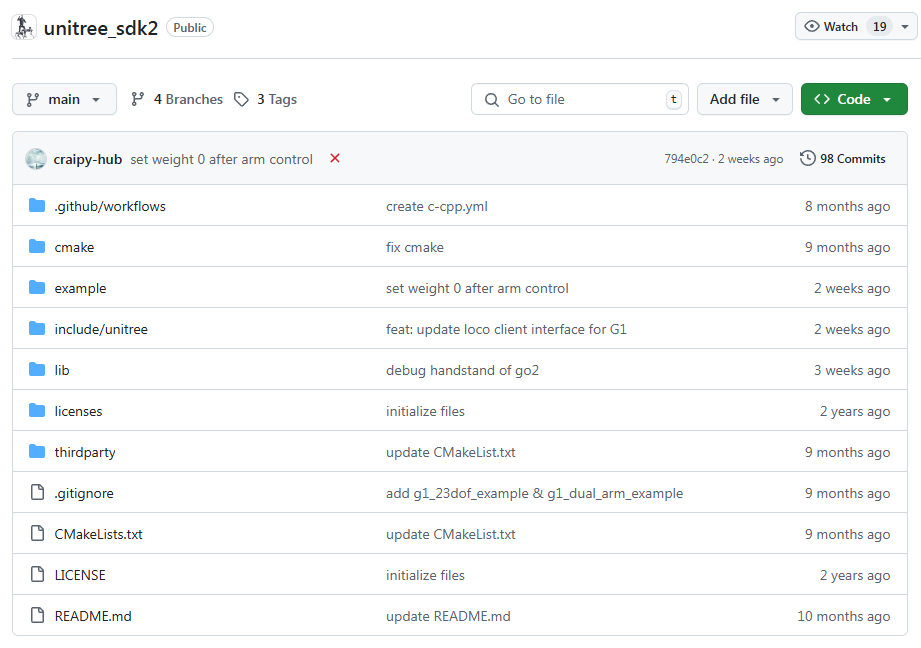
底层驱动层
宇树科技提供的 G1 SDK(基于 ROS 封装的硬件接口,包含关节控制、传感器数据读取等功能)
驱动程序(实现电机控制与传感器数据采集)
中间功能层
运动控制引擎(基于 Mujoco 物理引擎的仿真模型)
数据融合模块(将多个传感器数据合并,提高定位精度)
应用层开发
ROS 功能包(组织不同功能的代码文件)
算法应用(如行走控制、路径规划等上层功能实现)
★
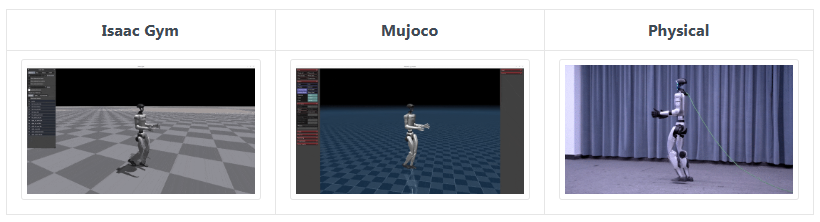
从虚拟世界开启 G1 开发实践
Isaac Gym:
由 NVIDIA 开发的强化学习仿真平台,支持高精度物理模拟
优势:可快速搭建机器人训练环境,支持 GPU 加速训练
Mujoco:
多体动力学仿真引擎,适合机器人运动控制算法验证
特点:通过 XML 文件定义机器人模型与物理参数
Isaac Gym 环境配置:
安装 CUDA 11.8(与 Isaac Gym 兼容的显卡驱动)
通过 pip 安装 Isaac Gym Python 包
导入 G1 机器人模型(需从官方获取或自行转换 URDF 模型)
Mujoco 仿真实践:
编写 G1 的 XML 模型文件(定义关节、质量、惯性等参数)
配置物理引擎参数(如重力加速度、摩擦系数)
实现简单的关节控制仿真(如单腿摆动测试)
★
从理论到实践的关键环节
理论基础:
零力矩点(ZMP)理论与步态规划
强化学习 PPO 算法原理(优势函数计算 / 策略梯度更新)
算法实现:
在 Isaac Gym 中构建 G1 行走环境(定义状态空间:关节角度、速度等;动作空间:关节力矩输出)
设计奖励函数(如前进距离奖励、摔倒惩罚)
使用 PPO 算法(近端策略优化)训练模型
激光雷达 SLAM:
Fast-LIO2 算法原理(基于点云匹配的激光雷达里程计)
视觉定位:
YOLOv11 目标检测(足球 / 球门 / 场地标线识别)
视觉定位数学模型:PnP 问题求解( Perspective-n-Point )
多传感器融合:
激光雷达与 IMU 的 EKF 融合定位
视觉与里程计的联合优化算法
全局路径规划:
A * 算法优化(启发式函数设计 / 双向搜索)
动态障碍物避障策略(时间窗口法)
局部避障算法:
DWA(Dynamic Window Approach)算法原理
在 Gazebo 中的实时避障演示
自主探索:
TarePlanner 与 FarPlanner 算法对比
探索策略:信息熵最大化 / 边界优先搜索
★
从仿真到应用的完整流程
目标:实现 G1 在平地、斜坡等场景的稳定行走
步骤:
在 Isaac Gym 中训练 PPO 模型(重点调整奖励函数,如增加站立平衡奖励)
在 Mujoco 中验证行走动力学稳定性(观察关节力矩是否在安全范围内)
在 Gazebo 中部署模型,测试真实环境适应性(如添加地面摩擦系数变化)
目标:完成实验室环境的地图构建,并实现自主导航
实施流程:
使用 Fast-LIO2 算法构建点云地图(推动 G1 在室内移动采集数据)
利用 NDT(正态分布变换)算法实现实时定位
结合 A * 与 DWA 算法,实现从起点到终点的避障导航
目标:实现 G1 在足球场上的目标识别、定位与踢球动作
关键技术:
YOLO 模型训练(识别足球、球门等物体)
视觉定位(通过识别场地标线确定机器人位置)
踢球动作规划(计算最佳击球点与关节角度)
项目目标:实现语音指令控制与室内自主巡航
技术实现:
对接语音识别 API
使用自然语言处理技术解析指令(如 "走到桌子旁边")
结合 VLN(视觉 - 语言导航)技术生成行走路径

★
宇树科技 G1 开发文档:包含硬件接口说明、SDK 使用指南(官方网站获取)
ROS Wiki:ROS 系统的详细教程与 API 文档(学习 ROS 的核心资源)
Isaac Gym 官方示例:NVIDIA 提供的强化学习仿真案例(可直接运行学习)
论文推荐:
《Learning Bipedal Locomotion for Humanoid Robots》(双足行走强化学习方法)
《Fast-LIO: A Fast, Robust LiDAR Inertial Odometry》(激光雷达里程计原理)
书籍推荐:
《机器人操作的数学导论》(运动学与动力学基础)
《ROS 机器人开发实践》(ROS 系统全面指南)
硬件配置:
G1 人形机器人本体(根据预算选择基础版或开发版)
激光雷达与深度相机(推荐与 G1 兼容的型号)
运动捕捉系统(如 OptiTrack,用于算法精度验证)
课程设计建议:
初级课程:《机器人基础与 G1 认知》(硬件结构、ROS 入门)
中级课程:《G1 运动控制与仿真》(行走算法、仿真工具使用)
高级课程:《人形机器人应用开发》(综合项目实践)
DF
技术支持
道非科技始终致力于为机器人开发提供全程技术支持,助您在 G1 机器人开发之路上攻克难点、畅通无阻。若您在开发过程中遇到任何技术问题,诚邀您随时与道非科技咨询交流,我们将为您提供专业的解决方案与持续的技术支撑。