Isaac Sim 是由 NVIDIA 公司开发的高级机器人仿真平台,构建在 Omniverse 平台之上,专为 AI 驱动的自主机器人研发打造。这款工具的核心价值在于通过高保真的虚拟环境,实现机器人从算法设计、功能测试到实际部署的全流程高效开发。
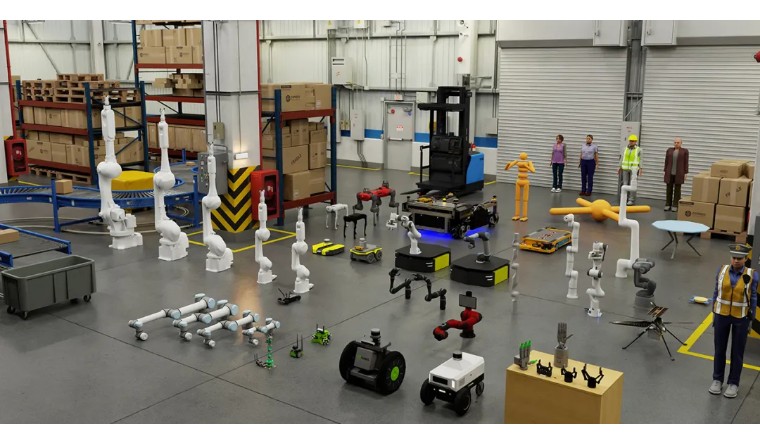
简单来说,Isaac Sim 就像一个超逼真的 "机器人训练场",能模拟出与现实世界高度相似的物理环境、物体特性和传感器反馈。开发者无需依赖实体机器人,就能在虚拟空间中对机器人的各种功能进行反复测试和优化,大大降低了研发成本和风险。

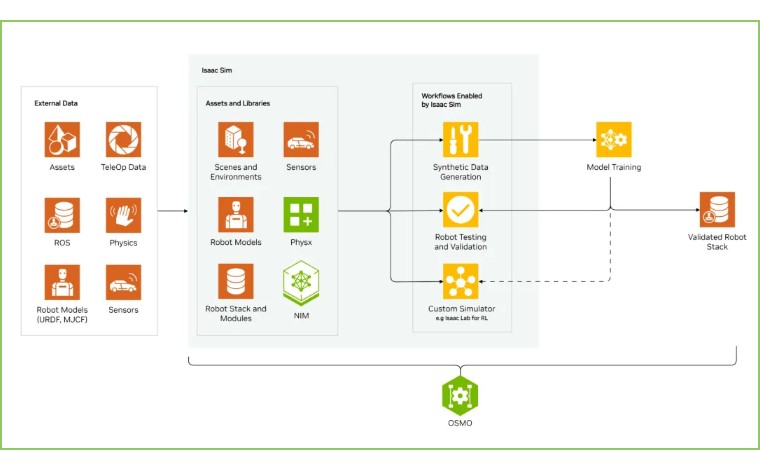
Isaac Sim 的功能体系围绕机器人研发的核心需求展开,形成了一套完整的解决方案。

合成数据生成是其一大亮点。它能自动创建海量带标注的训练数据,涵盖不同场景、光照、物体状态等多种变量。这些数据可直接用于训练机器人的计算机视觉模型,解决了现实中数据采集成本高、标注难的问题。比如,它能生成数百万张包含物体位置、类别等信息的图像,让机器人快速学习识别和处理各种场景。
软件在环测试功能则实现了虚拟与现实的无缝对接。它支持 ROS/ROS2 等主流机器人软件框架,开发者可以将实际的机器人控制程序放在虚拟环境中运行,测试导航、避障等算法在复杂环境中的表现。无论是单个机器人的路径规划,还是成百上千个机器人的协同作业,都能在虚拟空间中得到充分验证。
在机器人学习方面,Isaac Sim 集成了专门的学习框架,支持强化学习、模仿学习等先进算法。开发者可以让机器人在虚拟环境中通过不断尝试积累经验,掌握抓取、装配等复杂技能,再将学到的能力平滑迁移到实体机器人上。


当前备受关注的人形机器人和四足机器人研发,更是离不开 Isaac Sim 的助力。
人形机器人因具备类人形态和复杂运动能力,研发难度极大,而 Isaac Sim 凭借高精度物理引擎,能精准模拟人形机器人的关节活动、重心转移等关键动作。例如宇树科技的 H1人形机器人,通过在 Isaac Sim 中反复训练行走、上下台阶、抓取物品等动作,不断优化平衡控制和步态规划算法,大幅缩短了从研发到落地的周期。


四足机器人在复杂地形的移动性能是研发重点,Isaac Sim 可模拟山地、碎石路、湿滑地面等多种场景,以及不同天气条件下的环境变化。开发者借助该平台测试四足机器人的腿部运动控制、姿态调整等功能,让机器人在虚拟环境中积累应对各种地形的经验。像 Unitree 等企业在开发新一代四足机器人时,就利用 Isaac Sim 优化机器人在崎岖路面的行走稳定性,使其能更好地适应户外作业需求。

传统仿真工具的固有局限
在机器人仿真领域,RViz 和 Gazebo 作为传统工具曾长期服务于研发需求,但随着机器人技术向高复杂度、AI 驱动方向发展,其局限性逐渐显现,而 Isaac Sim 在技术架构上的革新则有效突破了这些瓶颈。
RViz 作为 ROS 核心可视化工具,专注于传感器数据和机器人状态实时显示,缺失物理模拟功能,无法验证运动学与动力学模型,且在大规模多机器人场景中性能欠佳,难以满足工业级协同仿真需求。
Gazebo 虽支持物理仿真与多机器人协作,但其CPU 物理引擎效率低,处理复杂场景需高性能服务器维持实时性;传感器模拟精度不足,影响视觉算法训练效果。此外,它对 AI 训练支持薄弱,缺乏域随机化工具,导致仿真训练的算法在真实环境中鲁棒性差。
Isaac Sim 的技术突破
Isaac Sim 依托 NVIDIA PhysX 物理引擎与 GPU 并行计算,实现高保真物理模拟。刚体动力学精度提升,支持导入制造商参数表,让虚拟机器人运动特性逼近真实。以人形机器人行走模拟为例,重心与力矩计算更精准,有效加快算法迭代。

传感器模拟上,基于物理渲染管线,数据更真实。激光雷达支持动态噪声与多回波,输出接近工业级设备;摄像头融合 RTX 光线追踪,可模拟镜头畸变等效果;IMU 数据与物理引擎实时同步,解决传统工具数据不同步问题。
AI 训练层面,Isaac Lab 框架打通仿真到实体的策略迁移。多 GPU 并行使单台设备可同时运行数百仿真环境,训练效率飙升。域随机化工具生成多样环境变量,增强算法在真实场景的鲁棒性。
扩展性与部署方面,云原生架构灵活便捷。开发者可本地开发,云端扩展训练任务。在多机器人协同仿真中,支持数百台机器人实时交互且帧率稳定,远超传统工具表现。

随着机器人技术的不断进步,Isaac Sim 正持续进化,为机器人研发带来更多可能性。它不仅是一款仿真工具,更是推动机器人技术从实验室走向实际应用的重要力量,在未来的智能时代中,必将发挥越来越重要的作用。