

ResMimic:人形机器人全身移动操作新范式,预训练 + 残差学习的精准突破
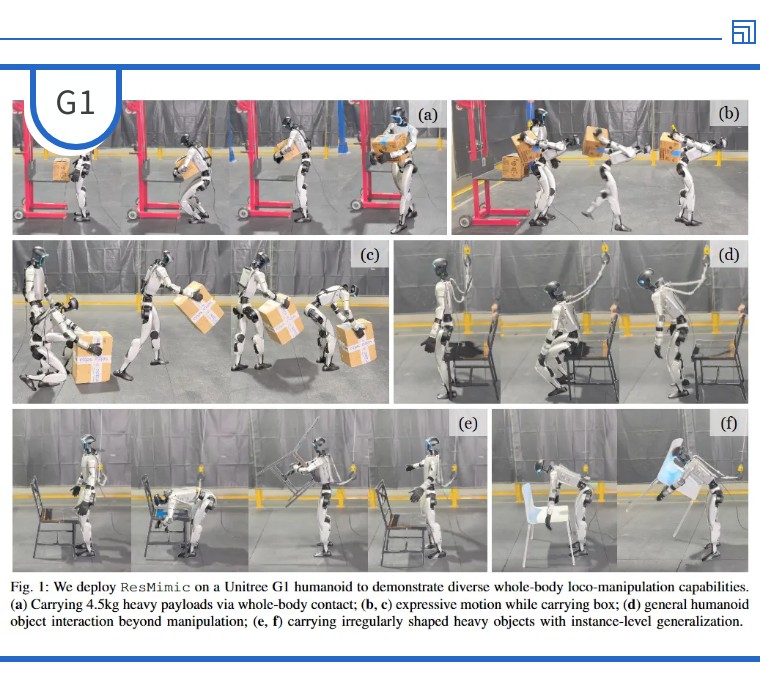
由亚马逊FAR实验室与斯坦福大学等机构联合研发的ResMimic,是一套专为解决人形机器人全身行走-操作(loco-manipulation)问题设计的两阶段残差学习框架。该框架构建于经大规模人类运动数据预训练的通用运动跟踪(GMT)策略之上,通过轻量级残差策略的优化,精准嵌入物体交互逻辑——既延续了人类运动的自然表现力,又达成了高精度的物体操作效果,有效破解了“单纯运动跟踪缺乏物体意识、专用操作策略泛化能力弱”的核心痛点。目前,ResMimic已成功部署在Unitree G1机器人平台,可稳定完成跪姿拾物、背负重物、深蹲举箱等复杂全身协同任务。
项目地址:https://resmimic.github.io/
人形机器人的核心价值在于其类人形态带来的场景适配性,而实现 “行走(locomotion)” 与 “操作(manipulation)” 的协同(即 loco-manipulation),是其落地的关键前提。然而长期以来,这一目标面临三重核心挑战:
数据稀缺性:全身移动操作需要同时兼顾平衡控制、物体交互、动作协调,高质量数据的采集成本极高,难以规模化获取;
精度与泛化矛盾:专注单一任务的控制器(如仅负责行走或桌面操作)无法迁移到复杂场景,而追求通用性的方案又往往牺牲操作精度;
embodiment gap(具身差异):直接将人类动作复现到机器人时,会出现接触点偏移、物体穿透或悬浮等问题,导致动作失效。

传统方法要么割裂行走与操作(如先站稳再动手),要么依赖高度定制化的任务设计,难以实现灵活、精准的全身协同。
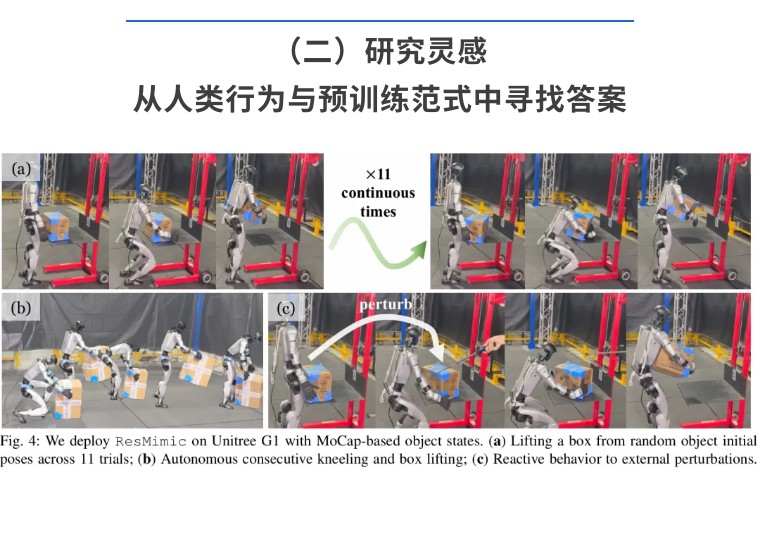
人类的移动操作能力源于 “通用运动基础 + 任务特异性调整”—— 我们先掌握行走、平衡等通用技能,再针对搬东西、开门等任务优化细节。这一逻辑与 AI 领域成熟的 “预训练 - 微调” 范式不谋而合。ResMimic 正是基于这一洞察,试图通过 “通用运动先验 + 残差修正” 的框架,解决移动与操作的协同难题,同时规避数据稀缺和具身差异带来的问题。
ResMimic 的核心创新是两阶段分离式学习框架,通过 “通用运动打底 + 任务残差修正”,实现高效、精准的全身移动操作控制,每一步设计均严格对应论文验证的技术路径:
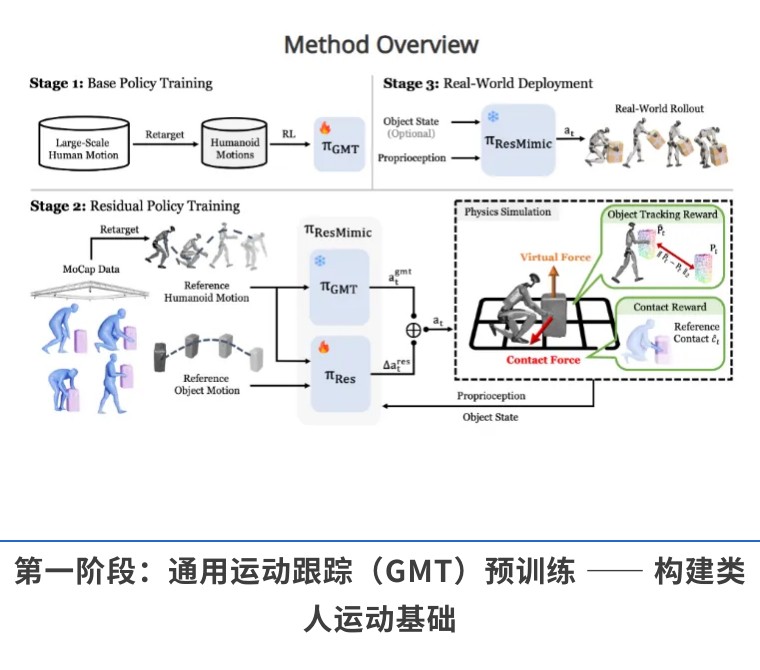
研究团队首先训练了一个任务无关的通用运动跟踪(GMT)政策,作为机器人的 “基础运动能力库”:
数据支撑:采用 AMASS、OMOMO 等公开运动捕捉数据集,筛选后包含 15000 + 片段(约 42 小时)的纯人类运动数据,不含物体交互信息,避免数据污染;
训练目标:让机器人能高保真复现人类的基础全身动作(如行走、跪姿、深蹲),核心指标是关节角度跟踪精度和身体平衡稳定性;
关键设计:输入包含机器人本体感知(关节角度、角速度、动作历史)和未来 10 帧的参考运动,让政策具备动作预判能力,提升跟踪平滑度。
这一阶段的核心价值是构建 “通用运动先验”—— 机器人无需针对特定任务重新学习平衡、迈步等基础技能,为后续操作任务减负。

在 GMT 政策的基础上,训练一个轻量级残差策略(π_Res),专门解决 “物体交互” 的特异性问题:
输入扩展:在 GMT 的输入基础上,新增物体状态(位置、姿态、速度)和物体参考轨迹,让政策具备 “物体意识”;
动作生成:最终动作 = GMT 输出的基础动作 + 残差策略的修正动作(Δa_res),修正量聚焦于物体交互相关的精细调整(如手部握力、躯干姿态补偿);
训练效率:由于基础动作已由 GMT 保障,残差策略仅需优化局部细节,大幅降低训练数据量和迭代成本。
这种 “基础 + 修正” 的架构,既保留了 GMT 的类人运动优势,又解决了物体交互的精准性问题,完美规避了 “从头训练” 的低效陷阱。
为解决残差学习中的优化稳定性、交互精准性问题,ResMimic 设计了三项核心支撑技术,均经过仿真与实机验证:

传统物体跟踪奖励仅计算中心位置和姿态差异,容易忽略局部交互精度。ResMimic 通过在物体表面采样 N 个 3D 点,计算当前点云与参考点云的整体误差,自然融合平移和旋转信息,奖励函数更平滑,优化过程更稳定,避免局部最优解。

为鼓励机器人采用类人的全身接触策略(而非仅依赖手部),研究团队将机器人身体划分为躯干、髋部、手臂等关键链路,基于人类演示数据获取 “理想接触区域”,通过奖励函数引导机器人在正确区域与物体建立有效接触。这一设计让机器人能利用全身承重(如用躯干辅助托举),突破了单纯手部操作的负载限制。

针对训练初期的不稳定性(如物体被撞翻、动作穿透),ResMimic 引入虚拟力引导:通过 PD 控制器对物体施加虚拟力,初期强引导物体贴合参考轨迹,后期逐渐减弱引导,让政策自主掌握交互逻辑。这一课程式训练策略大幅降低了早期训练失败率,加速了收敛。
ResMimic 的有效性通过 “仿真对比 + 实机部署” 双重验证,测试平台为 Unitree G1 人形机器人(29 自由度,身高 1.3m),核心实验结论均来自论文公开数据:

在 MuJoCo 仿真环境中,针对四项核心任务(跪姿拾箱、背部运箱、深蹲拾箱、椅子搬运),ResMimic 与 “基础 GMT 政策”“从头训练”“GMT 微调” 三种基线对比,表现如下:
任务成功率:ResMimic 平均达 92.5%,而基线最高仅为 10%(基础 GMT);
训练效率:收敛迭代次数平均仅 1300 次,远低于 “从头训练” 的 4500 次和 “GMT 微调” 的 2400 次;
跟踪精度:物体跟踪误差(Eo)平均 0.12,运动跟踪误差(Em)平均 0.13,均显著低于所有基线。
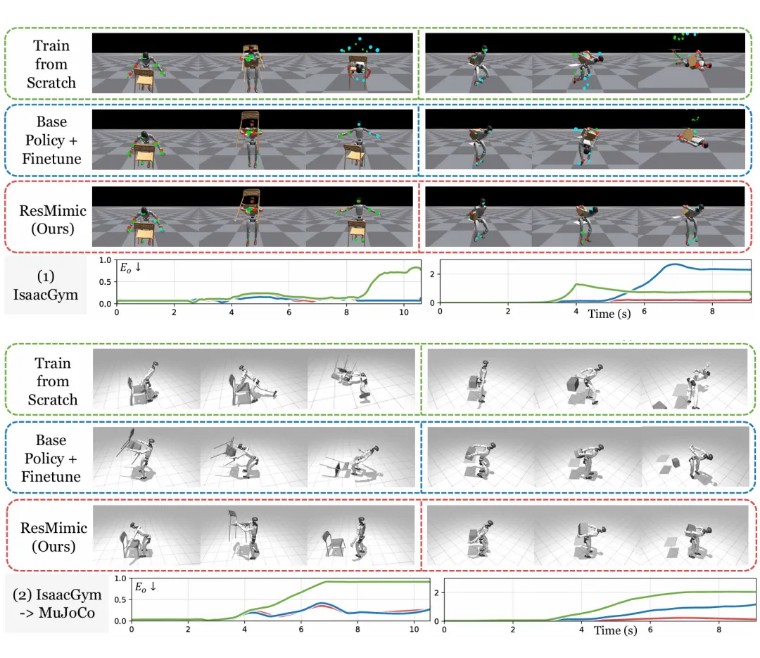
值得注意的是,ResMimic 在 IsaacGym 中训练后,迁移到 MuJoCo(更贴近真实物理)时性能几乎无衰减,验证了其鲁棒性。

在 Unitree G1 上,ResMimic 成功演示了以下经论文验证的能力:
重物搬运:通过全身接触,稳定搬运 4.5kg 物体(超过机器人手腕 2.5kg 的额定负载);
不规则物体适配:成功操作椅子等非规则形状物体,体现实例级泛化能力;
全身协同动作:完成跪姿拾物、深蹲拾物、背部运箱等需要全身协调的动作;
抗干扰能力:在外部轻微扰动下,仍能保持平衡和物体控制。
结合论文实机演示和技术特性,ResMimic 当前已具备落地潜力的场景包括:
仓储轻量级搬运:针对规则 / 不规则中小型重物(≤4.5kg)的短距离移动搬运,如仓库零件转运、货架整理;
实验室 / 特定环境操作:需要全身协同的重复性任务,如实验器材搬运、特定工位的物体转移;
人机协作辅助:在受控环境下协助人类完成需全身发力的操作(如协助搬运轻度重物)。

需客观认识到,ResMimic 仍处于技术验证阶段,存在以下未突破的限制:
负载上限:实机验证的最大负载为 5.5kg(椅子搬运),远未达到工业级重载需求;
场景复杂度:当前演示均在结构化环境(无障碍物、物体初始位置已知)中完成,未验证动态障碍物规避;
鲁棒性边界:对物体表面材质、环境光照的适应性尚未经过充分测试,极端条件下的稳定性未知。

ResMimic 的核心贡献并非单一技术突破,而是构建了一套 “通用运动预训练 + 任务残差微调” 的全身移动操作框架,其价值体现在:
解决了数据效率问题:通过复用大规模纯人类运动数据,避免了移动操作任务的数据稀缺陷阱;
平衡了通用与精准:GMT 保障类人运动的通用性,残差策略保障操作的精准性;
具备实机落地能力:在 Unitree G1 上的验证证明了其从仿真到现实的迁移潜力。
作为首个将 “预训练 - 残差学习” 范式成功应用于人形机器人全身移动操作的框架,ResMimic 为后续研究提供了清晰的技术路径 —— 未来的人形机器人或许无需为每个任务 “从头学习”,而是像人类一样,在通用技能基础上快速适配各类场景。
论文已开源 GPU 加速仿真基础设施和运动数据集,感兴趣的读者可通过https://resmimic.github.io/查看完整实验视频和技术细节。































