

ODYSSEY:让四足机器人从 “机械执行” 到 “自主思考” 的突破
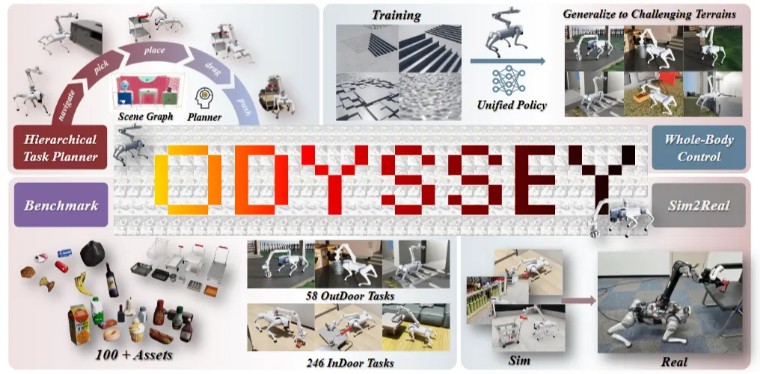
想象这样一个场景:在杂乱的卧室里,一台四足机器人灵活地避开地毯上的玩具,用机械臂精准抓起散落的积木放进收纳盒;转身来到户外,它沿着斜坡稳健行走,轻松拖拽沉重的工具箱到指定位置 —— 这不是科幻电影的片段,而是 ODYSSEY 框架正在实现的未来。
长期以来,机器人在现实世界中的表现始终面临三大挑战:面对人类的自然语言指令,它们常常 “理解偏差”;在家具布局多变的客厅或地形复杂的庭院中,操作能力会大打折扣;更棘手的是,既要灵活移动又要精准抓取,这种 “边跑边做” 的协调能力一直是技术难点。
传统机器人要么像 “桌面专家”,只能在固定场景里重复简单动作;要么像 “笨拙的大力士”,能移动却抓不准,能抓取却走不稳。而 ODYSSEY 的出现,正是为了打破这些局限 —— 它让四足机器人既能 “听懂” 复杂指令,又能在沙发、楼梯、碎石路等多样环境中 “手脚并用”,真正成为能应对日常任务的 “全能助手”。

当你说 “把阳台的花盆搬到客厅窗台”,ODYSSEY 会先在脑海里画一张 “地图”,再一步步拆解任务 —— 这背后是它的 “分层视觉 - 语言规划系统”,就像给机器人装上了 “大脑前额叶”。
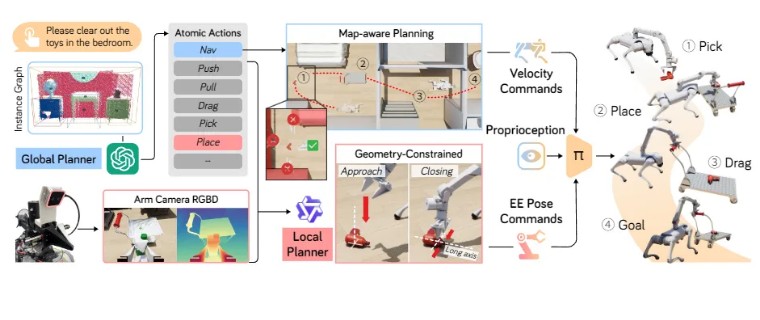
架构总览如上图所示,ODYSSEY 的 “思考流程” 分为三层:
其中,分层规划的细节就像 “总指挥官 + 现场工程师” 的配合:

全局任务拆解:通过摄像头和激光雷达扫描环境,构建包含 “花盆、阳台、窗台” 的语义地图,再用 GPT-4.1 这样的大语言模型把指令拆成 “导航到阳台→抓起花盆→导航到客厅→放在窗台” 等 “原子动作”,并规划出避开障碍物的移动路线。
局部动作细化:当机器人来到花盆前,腕部的摄像头会拍摄特写画面,由 Qwen2.5-VL 视觉模型识别 “花盆把手” 的精确位置,同时自动计算机械臂的最佳角度 —— 比如让机械爪的 “掌心” 与花盆表面垂直(轴对齐约束),确保抓得稳。

四足机器人的 “四肢 + 机械臂” 是个 18 关节的复杂系统,既要用四条腿在斜坡上保持平衡,又要用机械臂精准够到高处的物体 —— 这就像人一边走平衡木一边用筷子夹豆子,难度极高。ODYSSEY 的 “全身控制策略” 通过 “两阶段训练” 解决了这个难题。
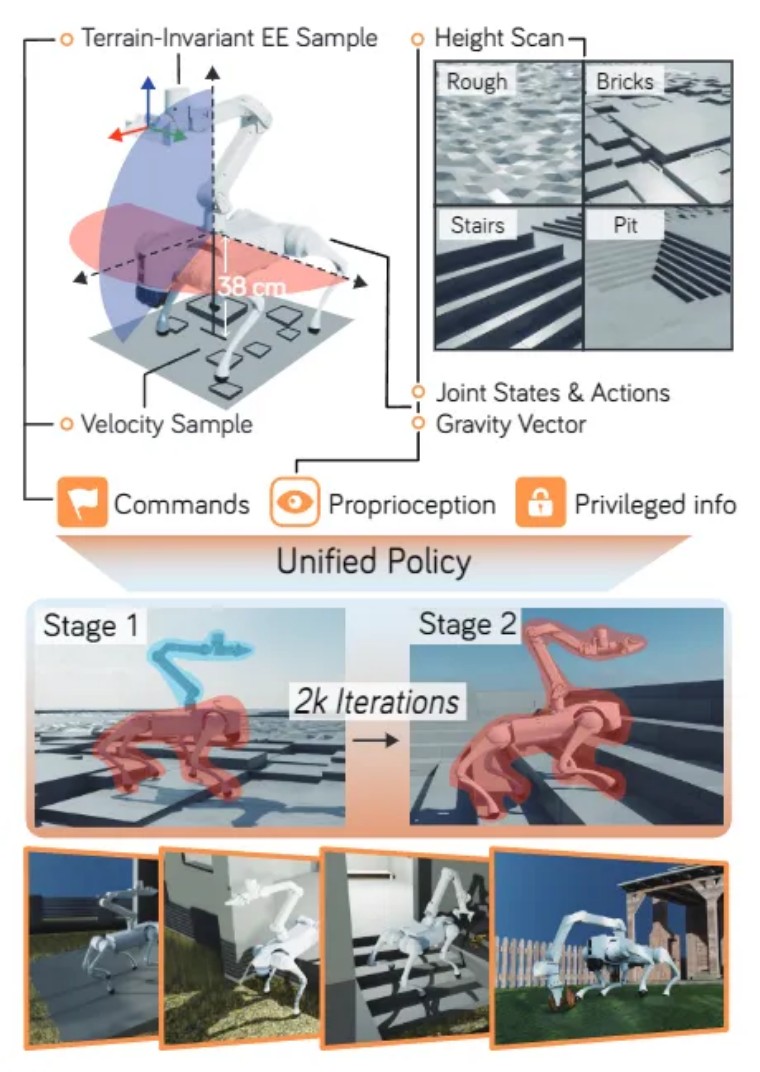
阶段 1:先练 “走路”:固定机械臂,让机器人在平地、斜坡、楼梯等场景中反复练习行走,通过 “步态奖励”(鼓励稳定的脚步节奏)和 “平衡奖励”(避免摔倒),练出适应复杂地形的 “肌肉记忆”。
阶段 2:再练 “动手”:解锁机械臂控制,让机器人练习 “边移动边抓取”。此时奖励系统会新增 “机械臂跟踪项”—— 比如当目标是 “抓杯子” 时,机械爪的位置与杯子的偏差越小,得分越高。
更聪明的是,ODYSSEY 会用 “地形不变末端采样” 技术:在规划机械臂位置时,直接在世界坐标系中锁定高度(比如 “抓桌子上的杯子时,机械爪高度固定在桌面上方 5cm”),避免因地面不平或机器人身体晃动导致的误差。配合 “领域随机化”(训练时随机改变地面摩擦、物体重量等参数),即使到了没见过的环境,机器人也能快速适应。
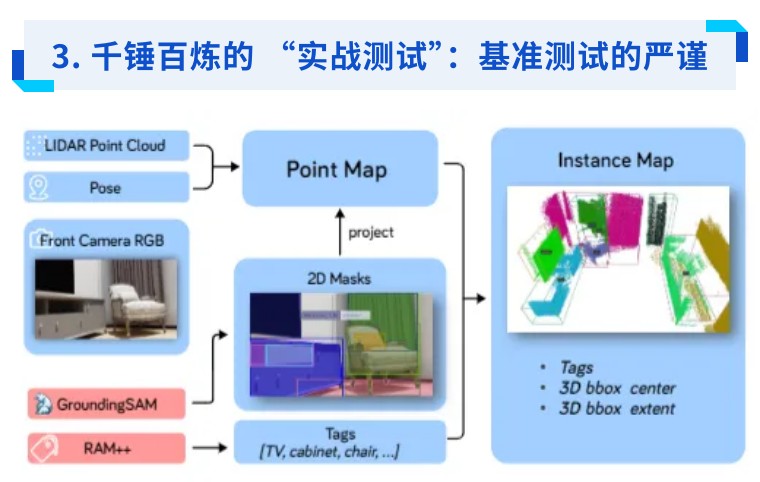
为了让机器人经得起现实考验,ODYSSEY 团队打造了首个 “长视野移动操作基准”—— 相当于给机器人准备了 “千套模拟试卷”,涵盖从简单到复杂的各种任务。
这个基准的 “严苛之处” 在于:
场景多样:从家具杂乱的卧室到高低不平的庭院,甚至故意加入 “突然出现的拖鞋”“松动的台阶” 等意外障碍;
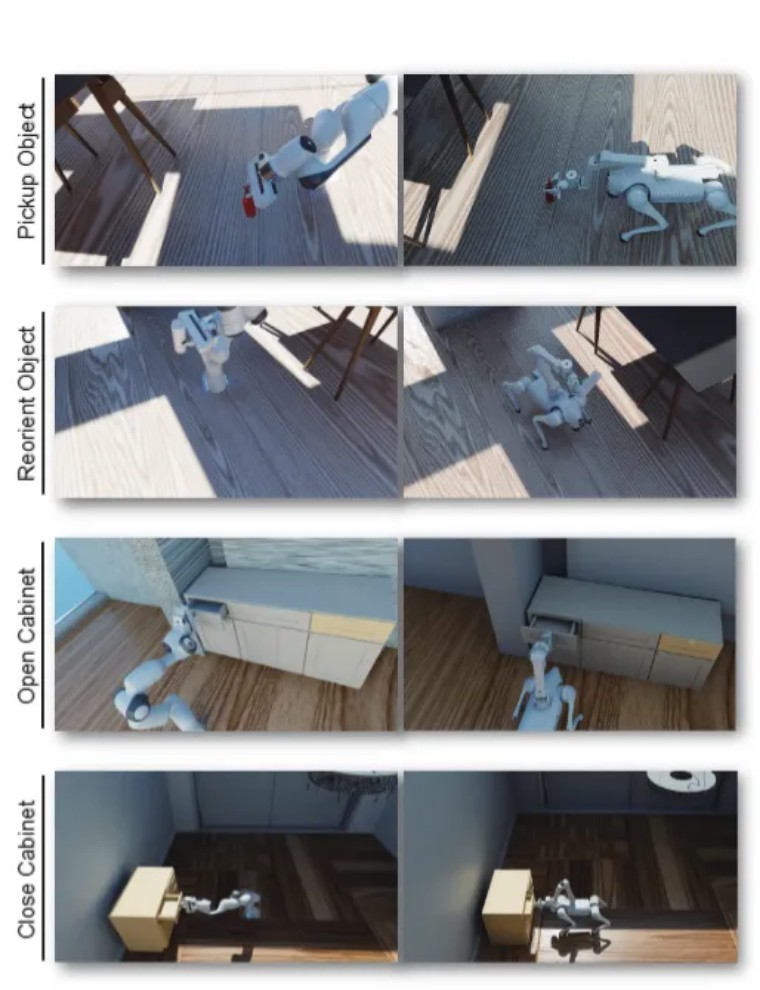
任务复杂:不仅有 “抓起杯子” 这样的单步任务,还有 “先找到购物车→把 3 件商品放进去→推到收银台” 这样的多阶段任务;
评分细致:不仅看 “最终是否完成任务”,还会记录 “导航是否迷路”“抓取是否掉落” 等每个步骤的成功率

从虚拟到现实:机器人真的 “能干活” 了
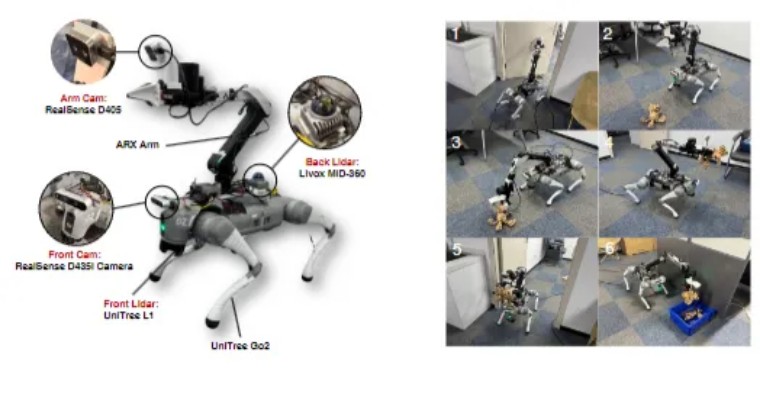
更令人兴奋的是,ODYSSEY 成功实现了 “模拟到现实” 的迁移。在实验室里,基于 Unitree Go2 四足机器人和 Arx5 机械臂的实体平台,它已经能在真实环境中完成 “导航拾取”“拖拽重物” 等任务 —— 虽然偶尔会因光线太暗认错物体,或因地面太滑抓不稳,但这些小瑕疵恰恰指明了优化方向。
就像人类在模拟器中学会开车后能快速适应真实道路,ODYSSEY 在虚拟环境中训练的技能,能直接 “迁移” 到实体机器人身上 —— 这意味着它离走进家庭、工厂、户外场景又近了一步。
ODYSSEY 的突破,不仅是技术的进步,更预示着机器人走进日常生活的可能:独居老人的家中,它可以帮忙取药、整理房间;户外救援中,它能在崎岖地形运送物资;甚至在工厂里,它能灵活处理不同岗位的任务。
或许不久的将来,当你下班回家,会看到四足机器人已经帮你收拾好客厅、备好晚餐 —— 而这一切,正从 ODYSSEY 的实验室里一步步走向现实。

宇树 Go2 edu 版本通过硬件模块化与软件开源化设计,为教育科研提供了从基础教学到前沿研究的完整解决方案。道非科技作为宇树官方认证代理商,可提供从设备选型、课程设计到技术落地的一站式服务,助力高校构建机器人教学体系,培养面向未来的智能硬件开发人才。

道非机器狗开发集成案例:机器狗农业巡检
道非机器狗开发集成案例:机器狗园区巡检+视觉检测

道非机器狗开发集成案例:机器狗按需定制集成































