

理论是实操的前提,尤其机器人涉及机械、控制、感知多学科交叉,需优先掌握以下核心知识:

1. 机器人学基础

掌握 “正运动学”(已知关节角度,计算末端位置)与 “逆运动学”(已知目标位置,求解关节角度),这是控制机器狗步态、机械臂抓取的核心(如 GO2 的腿部关节控制、G1 的手臂运动规划);
了解动力学基本原理(力、力矩与运动的关系),理解机器人负载、惯性对运动精度的影响,避免硬件损坏(例如 G1 抓取重物时需考虑力矩限制)。

入门经典控制理论 ——PID 控制(比例 - 积分 - 微分),这是机器人最常用的控制算法(如 GO2 电机转速稳定、G1 关节位置控制);
了解现代控制理论基础(状态空间法),为后续复杂控制(如步态优化、自主避障)打基础。
2. 感知与决策基础

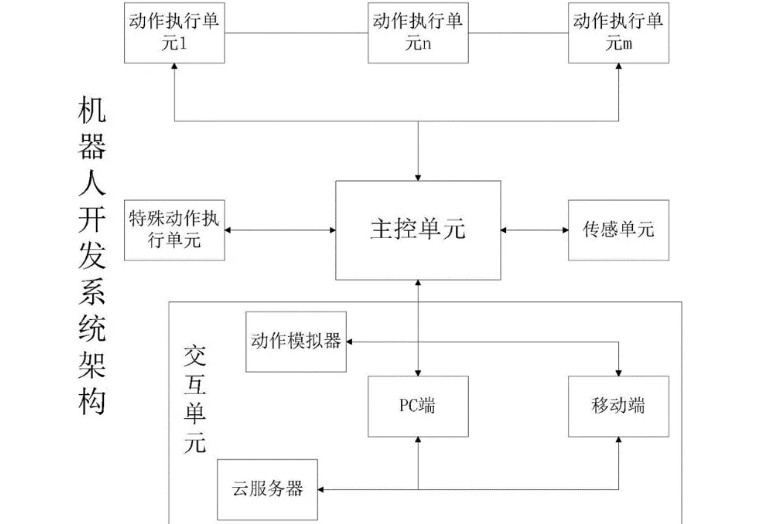
理解 “感知 - 决策 - 控制” 闭环逻辑:传感器采集环境数据→算法处理数据(如识别障碍物、定位自身位置)→输出控制指令驱动硬件;
基础数学工具:线性代数(矩阵运算,用于坐标转换)、概率论(用于传感器数据滤波,如 IMU 噪声处理)、微积分(动力学方程推导)。

编程与系统工具是连接理论与硬件的桥梁,需重点掌握以下工具链:
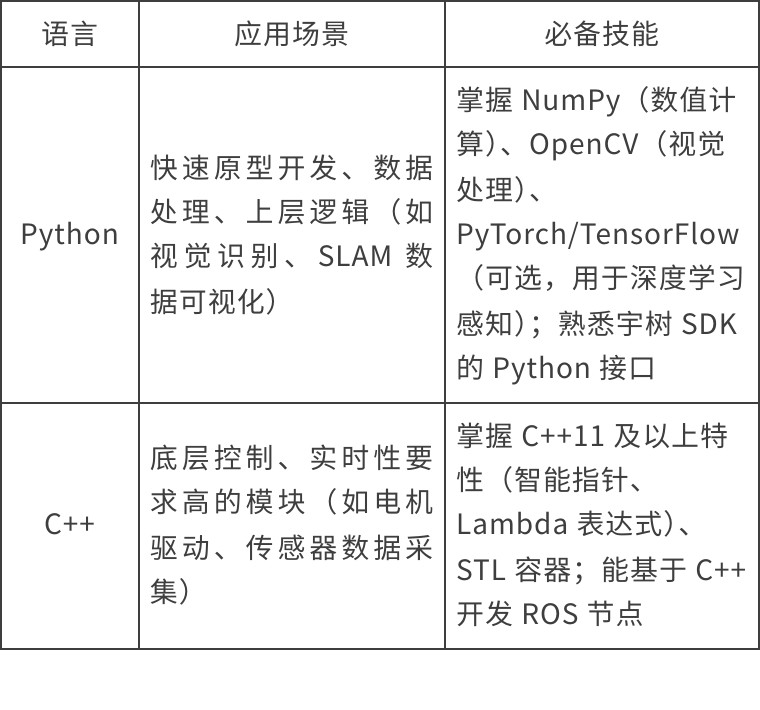
1. 核心编程语言
2. Linux 与 ROS 系统(核心开发环境)
宇树机器人官方驱动、控制算法多基于 Linux+ROS 开发,是必备技能:

推荐发行版:Ubuntu 20.04(对应 ROS 1 Noetic)、Ubuntu 22.04(对应 ROS 2 Humble),需匹配宇树官方驱动支持版本;
必备操作:
常用命令(文件操作:ls/cd/cp、进程管理:ps/top、权限控制:chmod/sudo);
Shell 脚本(自动化任务,如一键启动机器人驱动 + 传感器节点);
CMake 编译(机器人 C++ 项目通用编译工具,需理解CMakeLists.txt配置逻辑)。
核心概念:
通信机制(话题 Topic:用于实时数据传输,如 IMU 数据、关节角度;服务 Service:用于异步请求,如机器人复位、抓取指令;参数服务器:存储机器人参数,如电机转速上限);
核心工具(rviz:可视化机器人模型、传感器数据;gazebo:机器人仿真,新手可先在仿真中调试算法,避免硬件风险;rostopic/rosnode:排查通信问题,如rostopic echo /imu查看 IMU 数据);
实操重点:
安装宇树官方 ROS 驱动(如 GO2 的unitree_go2_ros包、G1 的unitree_g1_ros包);
实现基础通信:发布控制指令(如通过/cmd_vel话题控制 GO2 移动)、订阅传感器数据(如读取机器人 的激光雷达点云)。
开发机器人需懂硬件原理,避免操作失误导致硬件损坏:
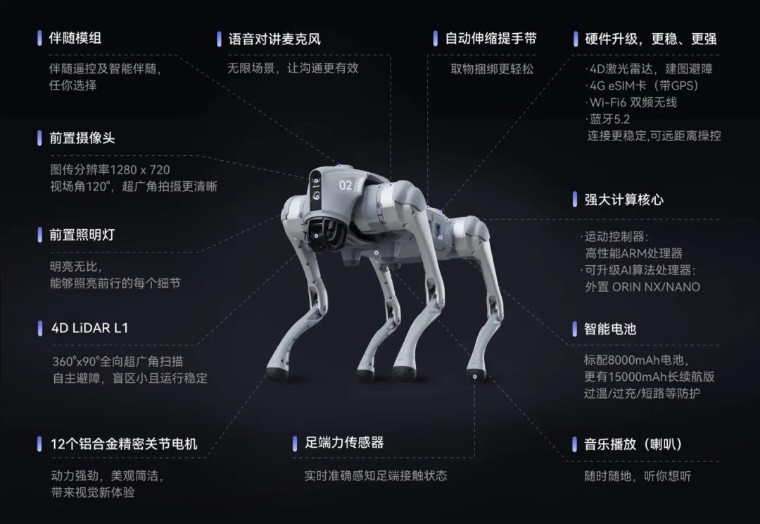
1. 宇树机器人核心硬件认知
执行器(电机):
需了解宇树机器人电机控制模式;
注意电机电流、温度限制(通过宇树 SDK 读取状态,超过阈值需紧急停止)。
电源系统:
锂电池需掌握正确充电流程(使用官方充电器),避免过充 / 过放;开发时需预留低电量保护逻辑。
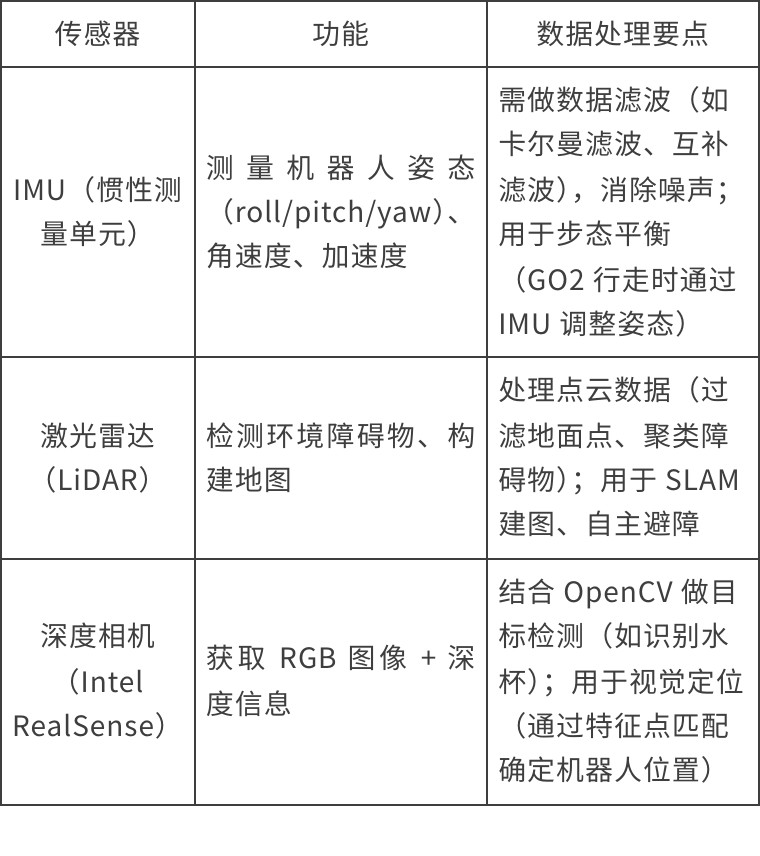
2. 常用传感器及应用
宇树机器人标配 / 可选传感器需掌握 “数据类型 + 处理逻辑”:
3. 硬件调试工具
基础工具:万用表(测量电池电压、电机电流,排查供电问题)、示波器(查看电机驱动信号波形,定位通信故障);
宇树专用工具:Unitree SDK 调试软件(查看电机状态、校准 IMU、更新固件)。
理论需落地到项目,推荐新手按 “仿真→硬件→进阶” 的顺序积累实践经验:
1. 仿真开发(低风险入门)
第一步:在 Gazebo 中搭建宇树机器人仿真环境
加载机器人 URDF 模型(宇树官方提供的 URDF 文件);
配置传感器插件(如 IMU 插件、激光雷达插件),确保仿真数据与真实硬件一致;
第二步:实现基础功能
控制仿真机器人运动:通过 ROS 发布/cmd_vel话题,让 GO2 直线移动、转弯;
简单避障:订阅激光雷达点云,编写节点检测前方障碍物,触发停止 / 转向逻辑。
2. 硬件实操(核心进阶)
安全前提:通读宇树机器人用户手册,明确那些“禁止操作”;
基础实操:
硬件连接:通过以太网 / USB 连接机器人与开发电脑,配置 IP 地址(匹配宇树官方要求);
驱动测试:启动官方 ROS 驱动,用rviz查看机器人模型,确认关节、传感器数据正常;
简单控制:编写 Python 脚本,调用宇树 SDK 让 GO2 实现 “走八字” 步态、G1 机械臂实现 “举臂” 动作。
3. 进阶项目(积累实战经验)
项目 1:SLAM 建图与自主导航
用 Cartographer/GMapping 算法,基于激光雷达构建实验室地图;
基于 ROS MoveBase 包,实现机器人从 “起点→目标点” 的自主导航(避开障碍物)。
项目 2:视觉抓取(G1 适用)
用深度相机识别目标物体(如用 YOLOv5 检测水杯);
结合逆运动学,控制机械臂移动到目标位置,用力矩传感器实现抓取。
项目 3:步态优化(GO2 适用)
基于 IMU 数据,调整 PID 参数优化行走稳定性;
开发 “上下台阶” 步态(需结合机器人运动学,调整腿部关节角度)。
阶段 1:入门准备(1-2 个月)
编程:掌握 Python 基础(函数、类)、C++ 基础(指针、STL);
系统:学习 Ubuntu 常用操作,安装 ROS 并完成基础教程(如 ROS Wiki 的 “Beginner Tutorials”);
理论:阅读《机器人学导论(Craig 著)》前 3 章,理解运动学基础。
阶段 2:基础开发(2-3 个月)
仿真:搭建 Gazebo 仿真环境,实现基础运动控制;
ROS:掌握话题 / 服务编程,能发布控制指令、订阅传感器数据;
硬件:通读宇树机器人手册,理解电机、传感器原理;用 SDK 调试软件查看硬件状态。
阶段 3:实战进阶(3-4 个月)
完成 1 个进阶项目(如 SLAM 导航、视觉抓取);
深入学习控制算法(如 PID 参数调优、卡尔曼滤波);
解决实际问题(如传感器数据噪声、机器人运动不稳定)。
阶段 4:深化提升(3-6 个月)
学习进阶理论(如模型预测控制 MPC、深度学习目标检测);
开发复杂功能(如多机器人协作、自主充电);
阅读宇树 SDK 源码,理解底层驱动逻辑,自定义控制接口。

官方资源:
宇树官网(https://www.unitree.com/):下载 SDK、ROS 驱动、用户手册;
宇树开发者社区:提问硬件问题、交流开发经验。
道非科技:作为宇树官方代理商,具备丰富的机器人二次开发实战经验,可提供从基础调试(如硬件连接、驱动安装)到复杂功能开发(如多传感器融合、自定义步态)的全流程技术支持,帮助解决开发中遇到的各类问题(如算法适配难题、硬件故障排查等)。
课程与书籍:
在线课程:B 站 “古月居 ROS 教程”、Coursera “机器人运动学与动力学”;
书籍:《ROS 机器人开发实践》(胡春旭著)、《机器人感知与导航》。
开源项目:
GitHub:宇树官方开源仓库(unitreerobotics/unitree_ros)

宇树机器人开发是 “理论 + 工具 + 实践” 的结合,降低了开发的门槛,新手无需畏惧,可按 “先仿真后硬件、先简单后复杂” 的节奏推进。关键是多动手(哪怕是简单的电机控制)、多排查问题(如 ROS 通信失败、传感器无数据),积累实战经验。随着技术储备的提升,你会逐步实现从 “操控机器人” 到 “开发机器人新功能” 的跨越,在具身智能浪潮中占据先机。

宇树 Go2 edu 版本通过硬件模块化与软件开源化设计,为教育科研提供了从基础教学到前沿研究的完整解决方案。道非科技作为宇树官方认证代理商,可提供从设备选型、课程设计到技术落地的一站式服务,助力高校构建机器人教学体系,培养面向未来的智能硬件开发人才。

道非机器狗开发集成案例:机器狗农业巡检
道非机器狗开发集成案例:机器狗园区巡检+视觉检测

道非机器狗开发集成案例:机器狗按需定制集成































