地点:南昌绿地国际博览中心
时间:2026年5月22日-24日
地点:潍坊科技学院
时间:2026年5月
地点:美国宾夕法尼亚州匹兹堡
时间:2026年9月27日-10月1日
与我们联系以预约会议并聊天
联系我们


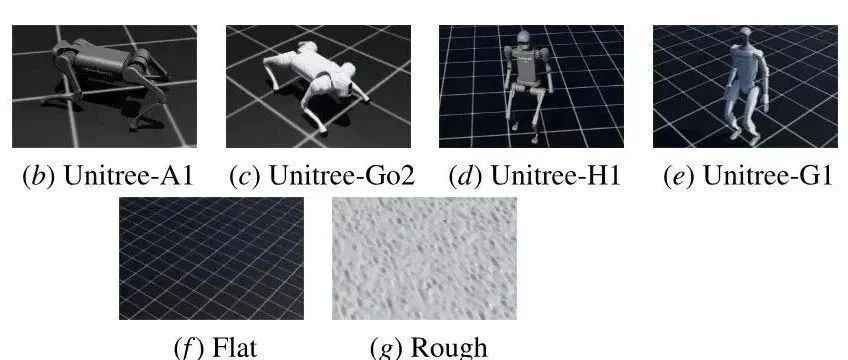
Continual Learning and Lifting of Koopman Dynamics for Linear Control of Legged Robots 是一个具有广阔前景的研究方向,它结合了Koopman动力学的非线性系统线性化能力与持续学习的适应性,为足式机器人的高效控制提供了新的解决方案。尽管面临高维学习、持续稳定性等挑战,但随着深度学习和控制理论的进一步发展,这一领域有望在机器人自主运动、复杂环境适应等方面取得突破性进展。
了解更多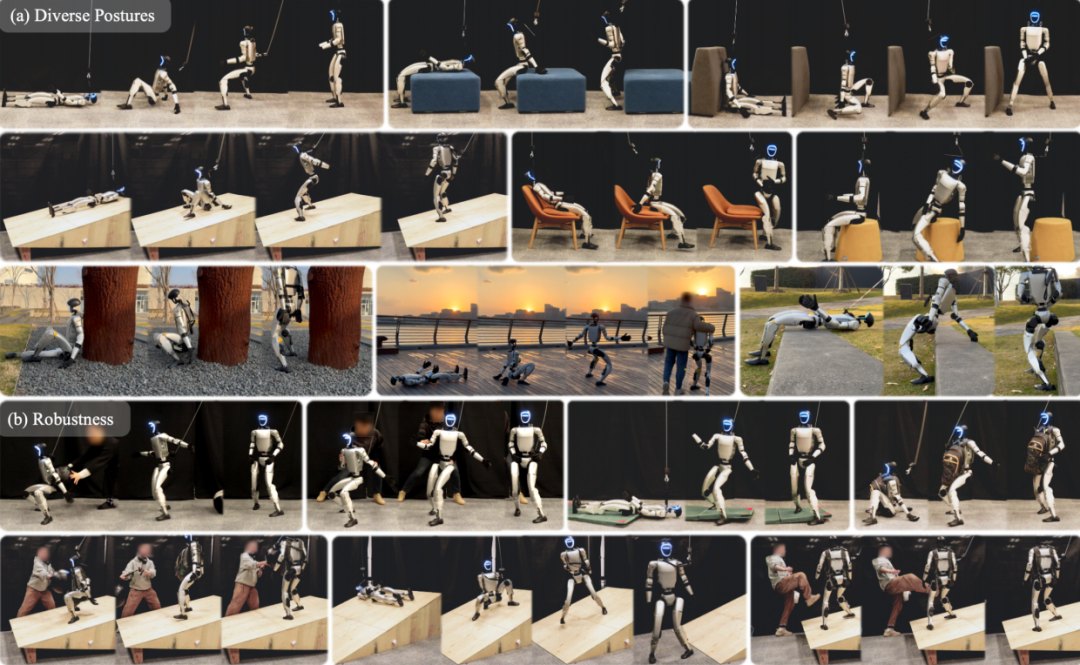
上海交通大学团队近期发表的研究成果中,基于宇树科技 G1 人形机器人,提出了强化学习框架 HoST(Humanoid Standing with Terrain adaptation),成功实现了机器人在多种起始姿势和复杂地形下的稳定站立控制。
了解更多