地点:南昌绿地国际博览中心
时间:2026年5月22日-24日
地点:潍坊科技学院
时间:2026年5月
地点:美国宾夕法尼亚州匹兹堡
时间:2026年9月27日-10月1日
与我们联系以预约会议并聊天
联系我们

道非科技用专业与耐心,让机器人从实验室里的 “冰冷设备”,真正转变为师生手中可探索、可实践的 “教学伙伴”,为潍坊科技学院机器人教学的开展注入了扎实动力,也为更多师生迈入机器人领域打开了便捷之门。
了解更多

在 ISSTC 2025 “柔性可穿戴与生物传感技术” 专题分会场中,除了学界与行业专家围绕传感技术前沿、基础研究突破的深度分享外,来自企业端的技术代表 —— 道非科技技术总监吕启明,也将带来具身智能领域的产业实践专题报告。
了解更多
本文正是基于这一需求,从理论、工具、硬件、实践四个维度,系统梳理宇树机器人开发的必备储备,并规划可落地的学习路线,帮你清晰认知 “从机器人使用者到开发者” 的差距,逐步具备独立开发机器人功能的能力。
了解更多
2025 年 9 月 21 日,由 CCF YOCSEF青岛主办的 “走向深蓝:水下具身智能架构突破与范式演进” 论坛在青岛成功举办。作为水下智能领域的前沿盛会,本次论坛聚焦 “感知 - 决策 - 系统” 三维度协同突破,吸引了中国海洋大学、中山大学、上海人工智能实验室等科研机构,以及道非科技等企业深度参与,共同为水下具身智能的技术演进与产业落地破局。
了解更多
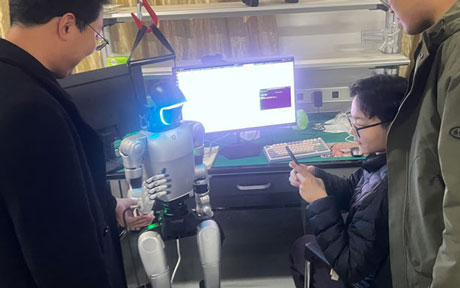
近日,道非科技成功为山东大学客户交付定制化培训集成的 TITA 机器人产品。从精准响应需求到高效完成集成,道非科技始终以客户为中心,用专业技术与贴心服务,为山东大学科研与教学工作注入新动力。
了解更多